Springer英文专著分享:结合穿戴技术的机器人操作与学习
 文章插图
文章插图
近十年来 , 机器人技术得到了迅猛发展 , 生产成本持续降低 , 为机器人进入更多领域 , 甚至家庭奠定了基础 。 智能机器人能够制造产品 , 代替和协助人解决难题 , 甚至挽救生命 。 当前 , 从制造业到医疗保健、交通运输以及对外太空和深海的探索 , 机器人正在对现代生活的方方面面产生巨大的影响 。 与此同时 , 机器人面临的场景越来越复杂 , 执行的任务越来越挑战 , 要求的智能程度也越来越高 。 而机器人如何能像人一样智能高效完成操作任务 , 也是我们一直努力的方向 。
近些年 , 随着智能传感技术的飞速发展 , 可穿戴设备在捕捉人类操作信息方面可以为机器人提供高质量示教 , 因此可应用于机器人操作技能的获取 。 在此背景下 , 本人六年来围绕穿戴技术与机器人技术的开展研究 , 以此撰写了英文专著“ Wearable Technology for Robotic Manipulation and Learning ” 。 专著由Springer出版社出版 , 共有三个部分 , 8章主要内容 。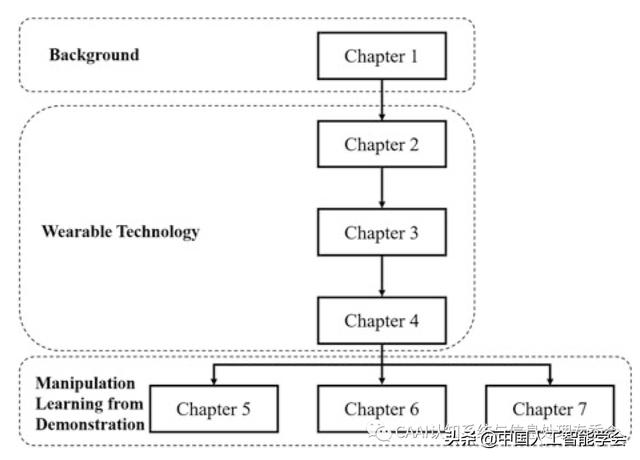 文章插图
文章插图
【Springer英文专著分享:结合穿戴技术的机器人操作与学习】第一部分介绍了智能穿戴设备的类型和发展现状 , 并具体阐述了穿戴传感、穿戴计算和应用情况 。 第二部分介绍可穿戴技术 。 在第2章详细介绍了惯性传感器和触觉传感器这两类常用的穿戴传感器 , 并在第3章介绍了基于惯性传感的手势动作捕捉装置 , 紧接着在第4章介绍了穿戴设备在手势识别、触觉交互和触觉感知方面的应用 。 第三部分介绍机器人通过示教操作学习的方法 。 第5章介绍了通过穿戴装置遥操作直接示教的机器人学习方法 。 第6章介绍了通过视觉遥操作直接示教的机器人学习方法 。 第7章介绍了通过穿戴装置间接示教的机器人学习方法 。 第四部分第8章对穿戴技术与机器人操作学习进行了总结与展望 。
本书的读者对象包括从事机器人和人工智能领域的科研人员和行业专家 。 此外 , 本书也可作为机器人、人工智能、软件工程、计算机科学与技术等相关专业本科、硕士、博士研究生的课外参考书使用 , 为相关专业研究生和本科生提供入门指导 , 同时还可以为业界相关领域应用和实践的从业者提供方法和技术指导 。
下载地址:
#about 文章插图
文章插图 文章插图
文章插图
本文由CAAI认知系统与信息处理专委会供稿
- 手机|手机文件夹都是英文,占空间还不敢删除,教你一招省下10G内存
- Amazon官方新闻更新1015
- 如何统计文本中的中英文字符数?Python帮你解决
- Qinghua|邮政式拼音简介:清华的英文为什么是“Tsinghua”而不是“Qinghua”?
- play|“玩手机”用英文怎么说?play the phone?!
- 取了“英文名”,年赚200亿,从3人团队成2万人跨国科技企业
- 谷歌|谷歌搜索:几乎所有的英文搜索都用上 BERT 了
- 表情|微信表情上新,666、裂开、翻白眼英文怎么说?
- 手机文件夹是英文不敢删,教你读懂这5个文件夹,一键腾出10G
- “搜英文单词出现淫秽图片”百度:已下线相关图片