HybridPose:混合表示下的6D对象姿态估计( 三 )
初始化子模块 。 令Rinit I和tinit I为初始化子模块的输出 。 本文通过解决以下优化问题来获得最优超参数αE和αS: 文章插图
文章插图
由于超参数的数量很少 , 并且位姿初始化步骤不接受显式表达式 , 因此本文使用有限差分方法来计算数值梯度 , 即通过将梯度拟合到超参数样本周围 。 当前的解决方案 。 然后 , 本文应用回溯线搜索进行优化 。
优化子模块 。 令β= {βK , βE , βS}是该子模块的超参数 。 对于每个实例(I , (Kgt I , Egt I , Sgt I , (Rgt I , tgt I)))∈Tval , 将(9)中的目标函数表示为fI(c , β) , 其中c =( cT , cT)T∈R6是RI和tI的局部参数化 , 即RI = exp(c×)Rgt I , tI = tgt I + c 。
优化模块解决了无约束的优化问题 , 其最佳解决方案由其临界点和临界点周围的损耗表面决定 。 本文考虑两个简单的目标 。 第一个目标力?f/?c*(0 , β)≈0 , 换句话说 , 真值标定大约是一个临界点 。 第二个目标最小化条件数κ(?2f/?2c*(0 , β))=λmax?2f/?2c(0 , β)/λmin?2f/?2c(0 , β) 。 该目标使每个最优解周围的损失面规则化 , 从而促进了fI(c , β)的大收敛半径 。 通过此设置 , 本文制定了以下目标函数来优化β: 文章插图
文章插图
其中μ设置为10-4 。 然后将(10)中使用的相同策略应用于优化(11) 。
三、实验评估本节介绍了对所提出方法的实验评估 。 第4.1节介绍了实验设置 。 第4.2节定量和定性比较了HybridPose和其他6D姿态估计方法 。 第4.3节提出了一项消融研究 , 以研究对称对应 , 边缘向量和修饰子模块的有效性 。
3.1 实验设置数据集 。 本文考虑了在6D位姿估计问题中广泛使用的两个流行的基准数据集 , 即Linemod和Occlusion Linemod 。 输出张量中的第一个通道是二进制分割掩码M 。 如果M(x , y)= 1 , 则(x , y)对应于输入图像I中感兴趣对象上的像素 。 分割掩码为 使用交叉熵损失进行训练 。
第二个2 | K | 输出张量中的通道给出所有| K |的x和y分量 关键点 。 应用基于投票的关键点定位方案 , 以从该2 | K |通道张量和分割掩码M中提取2D关键点的坐标 。
下一个2 | E | 输出张量中的通道给出所有| E |的x和y分量 边缘 , 本文将其表示为Edge 。 i(0≤i <| E |)是边缘的索引 。 然后 文章插图
文章插图
是一组包含第i个边缘向量的逐像素预测的2元组 , 其均值被提取为预测边缘 。
输出张量中的最后2个通道定义对称对应关系的x和y分量 。 本文将此对称对应关系的2通道“映射”表示为Sym 。 令(x , y)为输入图像中感兴趣对象上的像素 , 即M(x , y)=1 。 假设?x = Sym(0 , x , y)且?y = Sym(1 , x, y) , 本文认为(x , y)和(x + ?x , y + ?y)关于反射对称平面是对称的 。
度量标准 。 本文使用两个指标来评估HybridPose的性能:
1. ADD(-S)首先计算分别由预测姿态和真值标定姿态变换的两个点集之间的距离 , 然后提取平均距离 。 当对象具有对称位姿歧义性时 , 将从两个变换后的集合之间的最近点计算平均距离 。 ADD(-S)精度定义为计算出的平均距离小于模型直径的10%的示例的百分比 。
2.在消融研究中 , 本文计算并报告角旋转误差|| log(RT gtRI)2 || 。 预测姿态(RI , tI)与真值标定姿态(Rgt , tgt)之间的相对平移误差ktI-tgtk d , 其中d为物体直径 。
3.2 结果分析如表1 , 表2和图3所示 , HybridPose可实现准确的位姿估计 。 在Linemod和遮挡Linemod上 , HybridPose的平均ADD(-S)准确度分别为94.5和79.2 。 Linemod上的结果优于所有其他方法 , 除了一种从中间表示回归姿态的最新方法 。 Occlusion-Linemod的结果优于所有最新方法 。 文章插图
文章插图
图3.位姿回归结果 。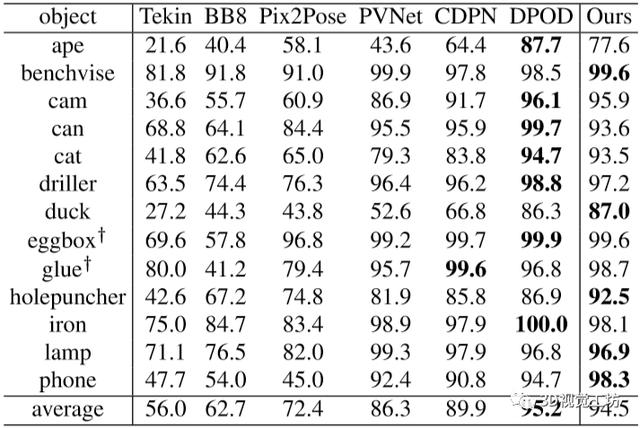 文章插图
文章插图
表1.定量评估:Linemod上的ADD(-S)准确性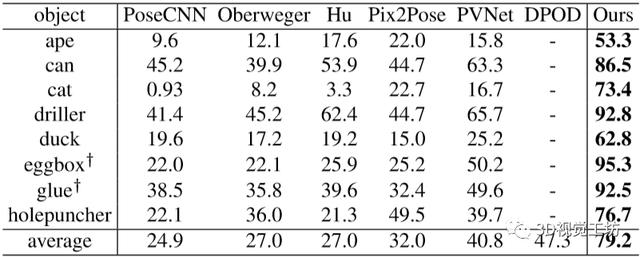 文章插图
文章插图
表2.定量评估:遮挡linemod数据集的ADD(-S)准确性
Linemod上的基线比较 。 HybridPose优于PVNet, PVNet是本文用来预测关键点的骨干模型 。 改进在所有对象类上都是一致的 , 这表明与单一中间表示相比 , 使用混合具有明显的优势 。 HybridPose在对抗DPOD方面显示出竞争性结果 , 在五个对象类上获胜 。 DPOD在此特定数据集上的优势来自数据扩充和显式建模的输入和投影图像之间密集的对应关系 , bothof可以满足不阻塞对象的情况 。 详细的分析表明 , HybridPose表现出次优性能的对象类别是Linemod中最小的对象 。 这表明本文的流水线中使用的基于像素的描述符受图像分辨率的限制 。
- 降价|iPhone12 mini会跌价到4000出头?果粉表示很期待!
- 麦景图发布全新MA12000旗舰混合式合并式放大器
- 斗鱼和虎牙合并,内部人员表示双方很团结,要联手对抗新敌人
- 美团|美团表示将积极遵守监管规定
- 平台|IBM 混合云平台:企业 2.5倍价值飞跃从哪儿来?
- 福音|一加新机即将发布,看到配置后网友表示:发烧友的福音
- 燕窝|辛巴就燕窝事件发表道歉信,表示将替品牌方进行赔付6198万
- 混合模式改|三分钟学会打造纹理叠加效果
- 刘强东表示干满5年就买房,干了10年的0001号快递员怎样?
- 服务器|TikTok现状如何首席安全官最新表示服务器已与字节跳动分开