驾驶|四维图新朱大伟:自动驾驶量产需要怎样的高精度地图?(附演讲全文)( 四 )
四维图新基于高精度地图以及自动驾驶解决方案,形成了完整的解决方案。通过和车道对比进行实时测评,出来的结果涉及的维度还挺多,包括相对精度、绝对精度、高精度惯导等评价都可以体现。当然我们按照客户要求做的一些更高精度的评估,包括夜晚场景都可以覆盖到。
以上就是四维图新整体的产品组合,云端的HDMS服务云可以做到整体的模拟仿真和众包的变化,发现更新;车端层面可以做到定位、交叉关联、路径规划。
自动驾驶地图的未来 5年前大家都认为L3、L4能很快来临,但是实际上L3、L4的到来比想象中要晚一些。
从现在各个车厂的规划来看,2023年L3才有可能正式量产,2025年L4以上才可能大规模量产。现在L2+才是最主要的市场,包括算力、各种传感器,功能安全,法律法规要求都在逐步完善。
我们也对比了一下,在国外,可能高速上跑的情况更多一些,但在国内,从家到公司两点一线的情况比较多。大部分情况下,百分之七八十都是在普通道路上行驶,百分之三十是在高速道路,很多场景功能ACC这些反而在普通道路上是用不起来的。
文章插图
所以我们认为,在L2一块还面临着很大体验提升需求。从L2本身来讲,城市路口多,只能在高速上用。对于L4来讲,成本、以及商业模式还没到临界点。L2+是一个很好的选择点,因为在高速上很多能力都已经实现了,这些能力在城市道路上也能用,能提升基于地图的普通道路的可用率。
因此,我们认为在普通道路上,未来会有成本相对低、自动化相对高的地图来支撑场景应用。
在这方面,我们和客户打造了一个叫LitePilot的地图,就是为了随时能让大家享受到自动驾驶的乐趣。他通用的功能是车道的路径规划,就是普通道路上一个车道的规划,他能无缝地把普通道路和高速道路连为普通道路,实现全场景的连接,帮助做到上下匝道环岛通行、路口通行,提前右转辅助等,这在以前没有地图的情况下是完全做不到的一些功能。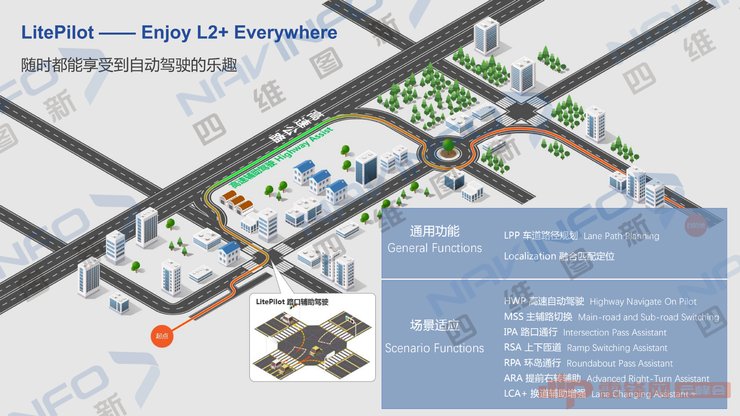
文章插图
对于未来的HD MAP,我们认为,V2X在中国是未来一个很好的增强自动驾驶能力的方向。边缘计算的一个好处是,能实时发现车辆所不能发现的信息,再结合高精度地图,能提供一个更稳定的信息,包括corner case、一些危险信息等。
最近我们在上海参加了一个“新四跨”活动,四维图新在里面做了高精度地图的支撑,70%的车厂都选用了四维图新的高精度地图。
要实现高精度地图从L2~L5的的无缝升级,我们认为有一个整体的演进路径。他是一个平滑的过程,从ADAS到L4的整体演进过程。
最后我们讲一下,地图想要真正用起来,其实要有一个完整的闭环生态。随着自动驾驶车辆越来越多,各种传感器配置越来越多,需要车辆和地图的云服务共同打通。我们会提供基于地图的客户化服务、基于用户运营的服务,通过大数据驱动,产生实现自动驾驶的一个演进。
(雷锋网)雷锋网
- 自动|碳博士控股子公司推出最新款自动驾驶清扫车
- 自动驾驶汽车|海外|自动驾驶无法可依?美国多个团体联合发布自动驾驶立法大纲
- 车辆|魔道之争,自主驾驶汽车会不会变成犯罪分子的工具?
- 自动驾驶|市工信局欧阳全局长带队考察羊城晚报创意园和中国电研威凯基地
- 潜力|【国金研究】新星初现,商业化落地正当时 ——自动驾驶先行者Waymo潜力几何
- 标准|自动驾驶汽车安全监管要有新标准了
- 北京汽车|无人驾驶应该已经不远,说说试驾BEIJING-X7的亲身体验
- 级别|自动驾驶级别如何划分?
- 能力|美国研发快速法评估神经网络的不确定性 改进自动驾驶车决策能力
- 市场|zerocar至优出行:自动驾驶驶入大车赛道,将主导未来出行市场?