驾驶|四维图新朱大伟:自动驾驶量产需要怎样的高精度地图?(附演讲全文)( 三 )
OTA升级会涉及到数据大小问题,大家可能会有一个误解,高精度地图跟导航地图不同,数据量可能会特别大。但事实上,从我们的数据来看,L3级别所需要的高精度地图,一公里的数据量大概只有20k左右。支撑L4的地图数据,量级大概是L3的10倍左右,30万公里也就大概几个 G的样子。
所以,车企在车辆进行架构设计或者空间预留时,留有最多20G的空间就可以满足未来几年的高精度地图使用情况。但其实不需要这么做,因为地图是动态更新的,很多旧有数据和材料没有太多意义。
至于众包更新,我们也和车厂做了一些验证。高精度地图想要发挥作用,众包更新是一个很关键的点。
四维图新也有自己的众包车队,能够把需要的区域信息更新通过众包的方式全部上传上来,但这种方式的经济性不太好。另外一种方式是,通过下发任务,让车辆将所有识别的变化内容以任务的形式上传到云端。这种方式更加轻量化,能够保证按需所取,快速进行更新。
众包更新听起来很好,但其实还远远不够的。因为现在路上跑的没几辆是自动驾驶车辆,或者说不能达到众包更新所要求的精度。所以现在的众包更新可能和专业车辆的更新成本差不太多。
但未来众包更新是必须的。这体现在几个点:一是范围,只有通过众包更新的方式才能将实现高速公路、普通公路的全范围覆盖;另一个是时效性,能够最先发现道路上的变化的,肯定是路上在跑的车辆。所以通过众包地图能够实现快速地发现变化,即便不能更新,也能发现哪些地方确实是有问题的。此外还可以对整个地图系统进行交叉验证。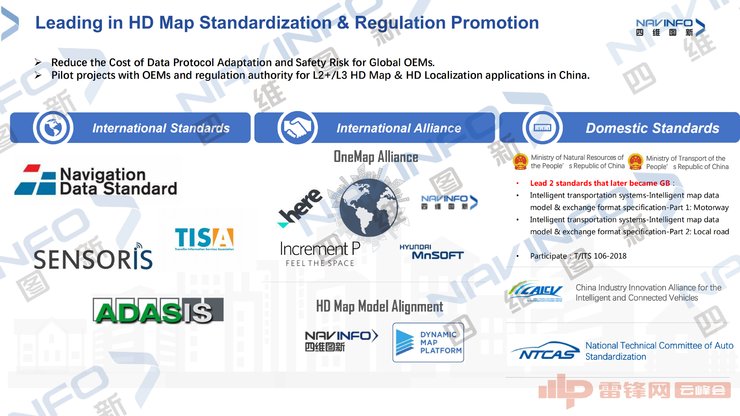
文章插图
接下来我们说一下标准方面的内容,对于国际市场、零部件的 OEM厂商来说,有统一的标准是最有利和最经济的。在高精度地图行业,国际上最通用的高精度地图标准是NDS,四维图新是第一家编出来NDS格式,然后在车上应用的图商,我们一直在标准联盟里积极活跃。
除了NDS标准之外,我们还有关于众包回传的一些标准,比如矢量化、要素种类以及属性等;还有关于实时交通的信息要求标准、ADAS的车内传输标准等。
为了达到更好的共同性,四维图新还和其他图商如HERE及联盟里的成员,将相应的地图规格做到共通。同时,我们还和DMP一起成立联合工作组,在地图规格上一个形成统一意见,更好地支持及DMP规格、支持车企的设备。
四维图新从2015年开始参加联盟,那时候高精度地图的标准并不成熟,从那时候开始我们就起草高精度地图的标准。目前这个标准应通过了国标委的答辩,正在跟交通部和自然资源部联合共同推动标准更新。
我们的标准分为两部分:高速道路标准、普通道路标准。说到标准,大家可能会关心一些法律法规问题,觉得现在的法律法规限制蛮多。但其实从行业发展来讲,在还没有准备好的情况下,还不能充分证明自动驾驶车辆的安全性,就贸然修改法律和法规吗?
法律本身不是优先对待自动驾驶,而是需要先做一个未来的规划,里面会包含很多场景,需要考虑的很全才能在法律上做得完善。现在很多部门都在想办法推动各种测试验证,希望各个图商、车厂能共同验证地图方案的安全性,所以在法律方面大家比较谨慎,也是可以理解的。
有一位院士讲过,地图、V2X以及网联汽车,是未来自动驾驶的三个基础设施。地图想要作为一个基础设施(好比水电煤),他的特点就是拿来即用。所以四维图新在这方面也做了一个相应的SDK解决方案,包括地图的OTA在线更新、APP,ODD、众包更新、还有V2X的一些支持。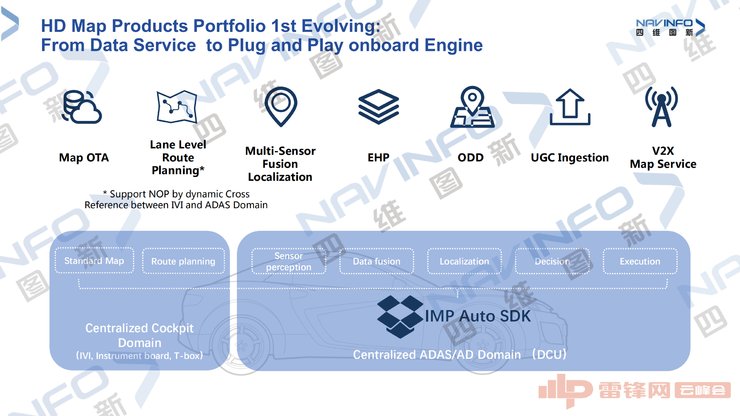
文章插图
大家最关注的两点是:车道级的路径规划,我们能和别的导航地图做一个动态的关联,不管是谁家的导航地图,都能和四维图新的高精度地图可以随时关联,做一个车道级的导航。
还有定位的内容,传统的定位主要是基于GNS+IMU。定位在传统导航里是非常起作用的,主要给人来看,稍微有点偏差影响不大。但如果要做自动驾驶级别的车道级导航,需要摄像头和地图匹配找到具体车道,然后基于匹配的结果和定位点做适配,再加上地图的一些属性比如坡度、曲率等,实现绝对定位和行驶轨迹的推算,这是地图的特别价值所在。
但现在定位也面临一些问题,一款车型上市之前大概有需要至少2万~10万公里的测试,这是很正常的。
还有一点是,自动驾驶需要自身自动选择车道行驶,但自身车辆的绝对精度和相对精度是怎样的?传统的评测办法是用惯导加GPS,然后做事后的对比。但现在还不能解决的一个问题是,车辆到底距离车道线还有多远?这个确定起来非常复杂。
- 自动|碳博士控股子公司推出最新款自动驾驶清扫车
- 自动驾驶汽车|海外|自动驾驶无法可依?美国多个团体联合发布自动驾驶立法大纲
- 车辆|魔道之争,自主驾驶汽车会不会变成犯罪分子的工具?
- 自动驾驶|市工信局欧阳全局长带队考察羊城晚报创意园和中国电研威凯基地
- 潜力|【国金研究】新星初现,商业化落地正当时 ——自动驾驶先行者Waymo潜力几何
- 标准|自动驾驶汽车安全监管要有新标准了
- 北京汽车|无人驾驶应该已经不远,说说试驾BEIJING-X7的亲身体验
- 级别|自动驾驶级别如何划分?
- 能力|美国研发快速法评估神经网络的不确定性 改进自动驾驶车决策能力
- 市场|zerocar至优出行:自动驾驶驶入大车赛道,将主导未来出行市场?