移动机器人的路径规划综述与发展趋势
移动机器人技术是近年来的研究热点 , 在工业、农业、医疗等行业广泛应用 。 路径规划技术作为自主移动机器人技术研究中的一个核心内容 , 是要实现移动机器人在未知环境下自主路径规划决策 , 具备实时、自主并识别高风险区域的能力 , 标志着移动机器人的智能化水平 。 本文重点分别从全局路径规划和局部路径规划角度对移动机器人路径规划的研究方法进行了分析与总结 , 同时也分析了移动机器人路径规划算法的未来发展趋势 。
自主移动机器人属于智能型机器人范畴 , 是集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统 。 近年来 , 自主移动机器人技术在工业、农业、医学、航空航天等许多领域发挥了重要作用 , 显示了其广泛的应用前景 。 文章插图
文章插图
在移动机器人相关技术研究中 , 路径规划是一个重要的环节和组成部分 。 根据机器人对环境信息掌握的程度 , 将路径规划分为全局路径规划和局部路径规划 。 本文重点对全局路径规划和局部路径规划进行分析与总结 , 最后对移动机器人路径规划的未来发展趋势进行了展望 。
一、路径规划的问题概述路径规划是指移动机器人按照某一性能指标(如距离、时间等)搜索一条从起始状态到目标状态的最优或次优路径 。 根据对环境信息的把握程度可把路径规划分为基于先验信息的全局路径规划和基于传感器信息的局部路径规划 。 其中 , 从获取障碍物信息是静态或是动态的角度看 , 全局路径规划属于静态规划(又称离线规划) 。 全局路径规划需要掌握所有的环境信息 , 根据环境地图的所有信息进行路径规划;局部路径规划只需要有传感器实时采集环境信息 , 了解环境地图信息 , 然后确定出所在地图的位置及其障碍物分布情况 , 从而可以选出从当前节点到某一子目标的最优路径 。
二、全局路径规划1.环境建模方法
(1)自由空间法
自由空间法是用提前定义好的例如凸多边形等常用的几何形状表示机器人工作空间 , 然后再转换为拓扑结构上的连通图 。 如图1 。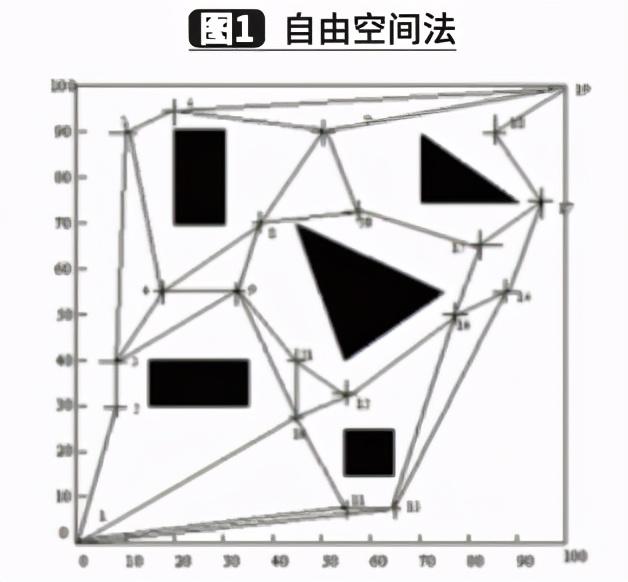 文章插图
文章插图
(2)栅格法
栅格法是将移动机器人的工作空间分解为许多网格状的单元 , 这些单元一般用0、1两个数值来表示 , 工作环境中的障碍物的形状和大小是一致的 , 而且移动机器人在行走的过程中 , 障碍物的位置、形状和大小是固定不变化的 。 对于移动机器人的工作环境用大小相同的栅格进行划分 , 栅格大小一般根据机器人的尺寸来确定 。 如图2 。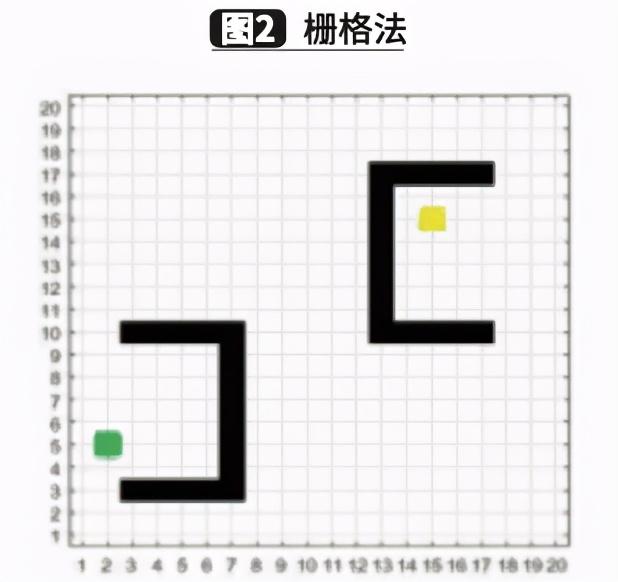 文章插图
文章插图
(3)拓扑法
拓扑法是根据拓扑结构上的一些特征将工作环境分成许多小空间 , 再由小空间之间连通还是不连通的关系建立一个有拓扑结构关系的网络 。 如图3 。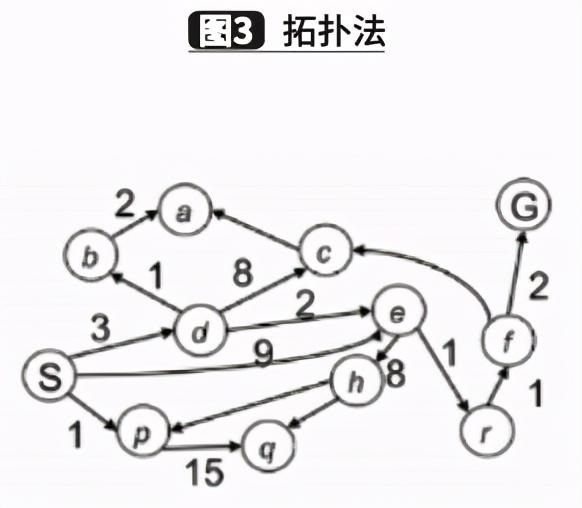 文章插图
文章插图
2.基于搜索的路径规划方法
(1)Dijkstra算法
Dijkstra算法从物体所在的初始点开始 , 访问图中的节点 。 它迭代检查节点集中的结点 , 并将和该节点最靠近的尚未检查的结点加入待检查点集 。 该结点集从初始结点向外扩展 , 直到到达目标节点 。 Dijkstra算法保证能够找到一条从初始点到目标点的最短路径 。
Dijkstra算法是一种经典的广度优先的状态空间搜索算法 , 算法会搜索整个空间直到到达目标点 , 这就导致了Dijkstra算法计算时间和数据量很大 , 而且搜索得到的大量数据对于移动机器人的运动是无用的 。
(2)A*算法
A*算法在Dijkstra算法的基础上增加了启发式特性 , 搜索的效率大大提升 。 A*算法按照Dijkstra算法类似的流程运行 , 不同的是它能够评估任意结点到达目标节点的代价 。 与Dijkstra算法选择离初始结点最近的结点不同 , 它根据启发式函数选择离目标最近的节点 。 A*算法无法保证找到最优路径 , 但是速度比Dijkstra速度快很多 。 如图4 。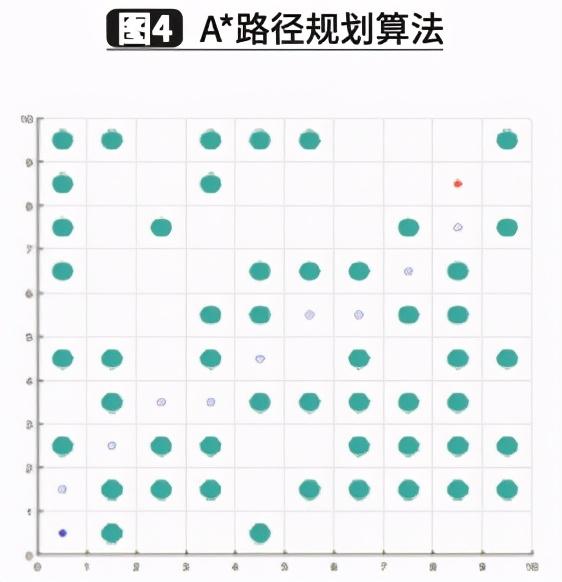 文章插图
文章插图
3.基于采样的规划方法
(1)概率路图法
概率路图法 , 是一种基于图搜索的方法 , 它利用随机采样技术将连续空间转换为离散空间 , 再利用A*等搜索算法在路线图上寻找路径 , 以提高搜索效率 。
这种方法能够用相对较少的随机采样点来找到一个解 , 对多数问题而言 , 相对少的样本足以覆盖大部分可行空间 , 并且找到路径的概率为1 。 但是 , 当采样点太少 , 或者分布不合理时概率路图法是不完备的 。 如图5 。
- 手机基带|为了5G降低4G网速?中国移动回应来了:罪魁祸首不是运营商
- 中国|浅谈5G移动通信技术的前世和今生
- 速度|华为P50Pro或采用很吓人的拍照技术:液体镜头让对焦速度更快
- 垫底|5G用户突破2亿:联通垫底,电信月增700万,中国移动有多少?
- 成为佛山移动服务体验官 表白留言赢取百元话费
- 建设|龙元建设中标中国移动宁波信息通信产业园二期施工项目
- 机器人|网络里面的假消息忽悠了非常多的小喷子和小机器人
- 广东移动OTN精智专网,助力千行百业数字化转型
- 跑腿|机器人“小北”上岗 让办事群众少跑腿
- 计算机学科|机器视觉系统是什么