驾驶|在自动驾驶领域,谁有机会成为那个通吃的赢家?( 二 )
文章插图
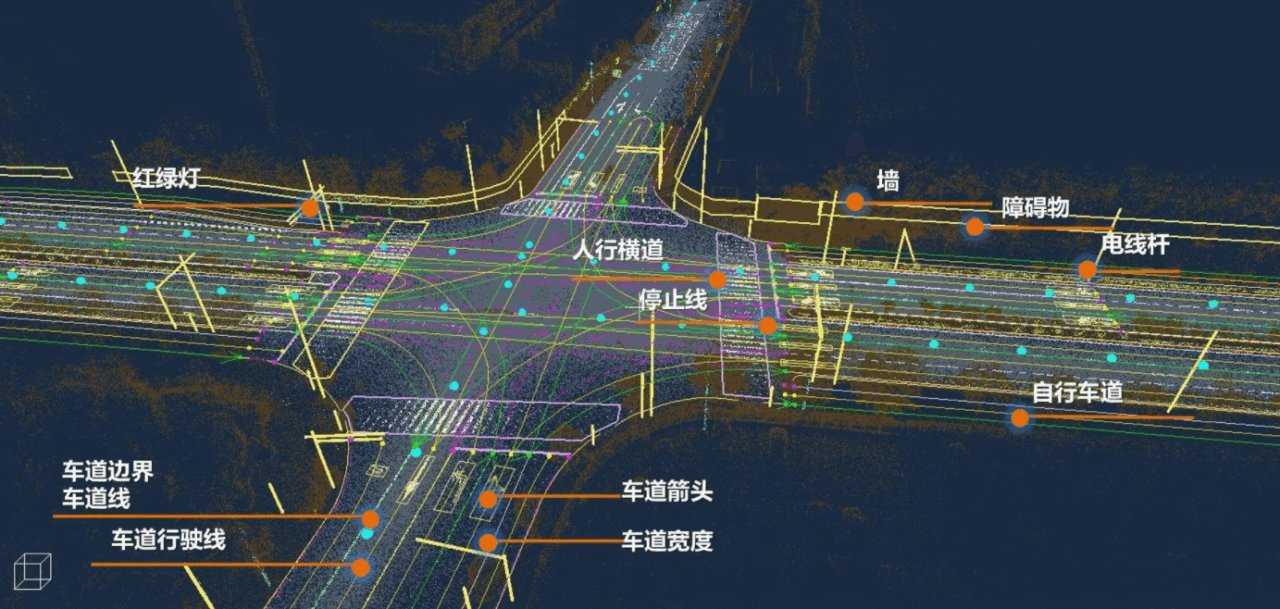
高精度地图
首先是地图。人类的大脑在不知不觉中会不间断的实时处理传感器(眼睛、耳朵、皮肤触觉)数据并建立我们周围世界的3D模型;这样,当我们穿越森林时,就不会被树根绊倒或将头撞在树枝上。在自动驾驶中,这被称为SLAM(同步定位和地图绘制)—我们绘制周围环境的地图并在其中定位自己。显然,这是自动驾驶的基本要求:汽车需要利用各种传感器搞清楚它在路上的位置以及周围有什么特征(直道,弯道,路肩,交通信号灯等),并且还需要弄清楚其他车辆与它的相对位置以及行车速度。
在真实道路上实时执行这种操作仍然非常困难。人类可以用视觉和声音定位,但是仅从成像(尤其是2D成像)中提取周围环境的数据并生成足够精确的3D模型仍然是一个尚未解决的问题:机器学习可以提高这种可能性,但是现阶段仍然没有足够的能力实时的做到高精度的自动驾驶。这就是为什么几乎所有的自动驾驶项目都将成像与360度激光雷达结合在一起:每个传感器都有其局限性,但是通过将它们结合起来(“传感器融合”),你可以获得完整的图像。在未来的某个时候,有可能仅凭成像就能建立你周围的世界模型,但是使用更多的传感器可以更快地到达那里,虽然需要等待这些传感器的成本和尺寸在未来达到使用的需求。
如果激光雷达是达到SLAM的一种捷径,那么另一个更有可行性的是使用预建地图。你可以预先测量所有道路(不需要实时的处理所有数据,建立道路模型),然后将完整的地图安装在任何自动驾驶汽车上。有了高精度地图,自动驾驶汽车就不必在高速行驶的同时还要实时处理所有数据并识别各种弯道、交通信号灯或各种预期外的杂物;而是可以在高清3D模型上发现关键地标并快速将自身定位在道路上。因此,自动驾驶汽车可以使用摄像头和激光雷达,并将它们感知到的图像与预先构建的高精度地图进行比对,而不必从头开始,从而能够让定位的速度和精度都有提升。
地图具有网络效应。当任何自动驾驶汽车沿着预先设计的道路行驶时,它既会将道路与地图进行比较,又会更新地图数据:每一台自动驾驶汽车都同时可以是一辆测试汽车。如果你已售出500,000辆自动驾驶汽车,而其他人仅售出10,000辆,则你的地图将更新得更频繁,并变得更准确,因此你的自动驾驶汽车将更少遇到全新的,出乎意料的路况和意外。你售出的汽车越多,它们的自动驾驶性能就越好—这正好符合网络效应的定义。
从长远来看,这里的风险是,就像自动驾驶汽车可以在没有激光雷达的情况下做到SLAM一样,它也可以在没有使用高精度地图的情况下做到SLAM—毕竟,人类也可以这样做。目前尚不清楚不使用高精度地图在未来是否会成为主流,但目前看来,已经有不少具有自动驾驶功能的汽车被销售,也有很多自动驾驶测试车辆在路上跑。
文章插图
地图是数据中的第一个具有网络效应的,而下一个是自动驾驶汽车在了解周围环境后的行为数据。在一个空旷的道路上行驶,或者在一个全是自动驾驶汽车的封闭道路上行驶是现在自动驾驶汽车的主要场景,但是弄清真实道路上其他驾驶员将要做什么以及如何做是则完全是另一个问题。
机器学习是自动驾驶进行突破的重要动力:机器学习不使用复杂的规则来解释人、汽车、道路的行动方式,而是使用数据(数据当然越多越好)。你收集的有关真实驾驶员在现实世界中的行为和反应方式的数据越多(可以通过测试车或学习特斯拉),你的自动驾驶系统软件就能更好地理解周围的情况,并且更聪明的规划和反应汽车下一步该做什么。就像地图一样,在发售前,你的测试车们会尽可能多的收集这类数据,发售后,你售出的每一辆车都会将这些数据收集并返回。因此,就像地图一样,你售出的汽车越多,汽车的自动驾驶系统就越强,这也就能达到网络效应。
在对自动驾驶系统的模拟训练中,行驶数据还能带来其它的优势。例如如果要解决以下问题:“如果发生X,我们的自动驾驶系统软件将如何反应?”,解决的方法之一是专门派一辆自动驾驶测试车,整天在城市附近的道路行驶,以查看它对碰巧发生的这种事件作何反应。但问题在于,这不是受控试验,这些随机的情况在现实中发生的概率是非常低的,所以测试的效率也会很低。因此更好的方式是,利用仿真软件对各种各样的情况进行试验,例如你可以反复测试“激光雷达会检测到那辆卡车吗?”这样的情景,而你也可以将测试的数据和情况与真实的路况数据进行比对。
- 麒麟|荣耀新款,麒麟810+4800万超清像素,你还在犹豫什么呢?
- 智能手机市场|华为再拿第一!27%的份额领跑全行业,苹果8%排在第四名!
- 行业|现在行业内客服托管费用是怎么算的
- 零部件|马瑞利发力电动产品,全球第七大零部件供应商在转型
- 通气会|12月4~6日,2020中国信息通信大会将在成都举行
- 俄罗斯手机市场|被三星、小米击败,华为手机在俄罗斯排名跌至第三!
- 体验|闭上眼睛点外卖是什么感觉?时隔一年再次体验,进步令人欣慰
- 当初|这是我的第一部华为手机,当初花6799元买的,现在“一文不值”?
- 自动|碳博士控股子公司推出最新款自动驾驶清扫车
- 出海|出海日报丨短视频生产服务商小影科技完成近4亿元 C 轮融资;华为成为俄罗斯在线出售智能手机的第一品牌