「自动驾驶·可靠性」问题解析:功能描述需谨慎
问题:
- 自动驾驶哪家强?
 文章插图
文章插图比如知名的动力电池供应商基本都在欧亚 , 北美加拿大的「E-one」虽然知名度很很高 , 但是在化学电源领域的排名也低至10名开外了;所以特斯拉选择的日本松下的电池 , 然而镍钴铝电池的热失控极限又非常低 , 结果使之成为了自燃率最高的电动汽车品牌 。
电动机用的是台湾富田产 , IGBT是德国英飞凌;然而在PHEV车型中故障率最高的选项 , 均为德系三强奔驰、宝马和奥迪 。 所以以欧美为核心的准汽车工业联盟 , 捎带着的日韩已经失去了主动权 , 想要体现产品竞争力只有通过营销 , 卖点则是放在可以存在争议的“自动驾驶” , 然而这个更不靠谱 。
 文章插图
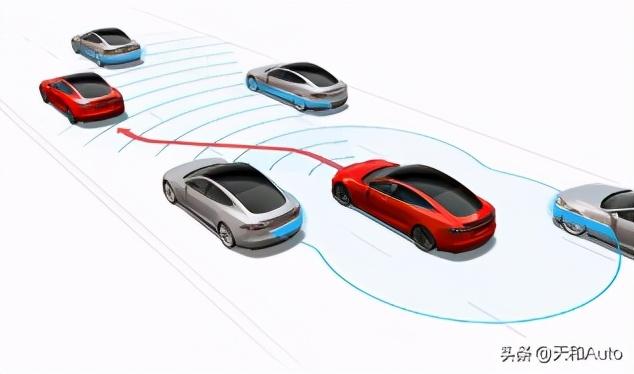
文章插图硬件缺点自动驾驶的概念其实很简单 , 简而言之为「电脑驾驶汽车」;只要让汽车的控制系统有“五官” , 那么对路况的识别似乎也就没有障碍了 。 不过汽车目前只有水平不够高的“视觉系统” , 以及像蝙蝠一样的雷达波侦测系统 , 这两套系统都不够可靠 。
1:视频采集系统当然就是摄像头了 , 通过环绕摄像头采集道路信息 , 这是存在相当问题的方式;比如在大逆光或远光灯照射的时候镜头如何采集信息 , 肉眼看不清楚摄像头也是看不到的 , 这种角度排出的照片不能正确对焦也是非常昏暗的 。
同时在能见度较低的天气中驾驶 , 人工驾驶在无法清晰识别的时候可以靠“猜” , 也就是依据经验和色差来分析 , 这是电脑做不到的 。
 文章插图
文章插图2:雷达波系统也存在较多的问题 , 毫米波雷达侦测距离远但是错误识别率高 , 空中任何悬浮且体积较大的异物都有可能因错误识别而强行制动车辆 。
激光雷达辅助提升识别率 , 甚至可以通过反射波运算出物体的形状特点进行对比分析;两套系统共同运行确实能提高识别准确率 , 但是也做不到100% 。 然而人工驾驶汽车的错误操作概率在很多时候都能做到准100% , 综合年均行驶里程数、汽车保有量和逐渐下降的交通事故率分析的结论 , 目前仍未人工驾驶更加安全 。
 文章插图
文章插图软件缺点问题1:汽车装备的视讯系统以及雷达侦测系统 , 其传感器少则几十多则上百;普通的智能手机只是几个传感器 , 主要在室内恒温的环境中使用 , 似乎用上两年也就会问题频发了 。 而且系统运算速度会逐渐减弱 , 甚至偶尔会出现宕机的情况 。
这么简单的手机都会出现问题 , 系统如此复杂的汽车如何保证系统鲁棒性呢?Robust鲁棒性已经成为评价自动驾驶汽车可靠性的概念 , 以目前的科技手段似乎还做不到让此类车辆安全稳定的运行 。
 文章插图
文章插图IT领域的巨头谷歌研发过自动驾驶汽车 , 结果也是事故频发;所以最终欧美很多科技领域公司 , 都表态L5级的全自动驾驶是没有实现的可能性的 。
至于很多在海内外实用性的所谓“无人驾驶汽车” , 其测试阶段不仅会在驾驶座“准备”一名驾驶员 , 同时副驾驶还要再配备一名安全员 , 用于记录车辆的问题与信息 。 然而很多测试员实际会忽略掉一些小问题 , 因为细节问题的反馈到处理是个比较复杂的流程 , 但很多小问题都会积累成为大问题 。
- 原来华为手机是开会神器,60秒输出500字,一键自动记录
- 搭建自己的云签到平台,解放双手每日自动签到-超详细
- 网络安全:如何使用MSFPC半自动化生成强大的木码?「下集」
- 面向销售自动化的基于数据扩增和真实图像合成的鲁棒多目标检测
- 不怕恶劣天气的芯片要来了,或让自动驾驶汽车视野更广无盲点
- 特斯拉全自动驾驶新测试版本数天内发布
- IntelliJ IDEA 如何设置自动下载源代码和文档
- 开发好物推荐9之自动生成在线接口+文档-Knife4j
- 微信打开这个功能,手机秒变扫描仪,扫描文档自动识别
- Python实现手机APP之自动打卡签到详细教程(小白合适)