学术分享丨假肢手的综述(2)( 四 )
 文章插图
文章插图
 文章插图
文章插图
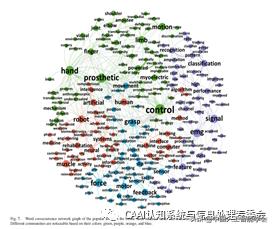
为了统计研究仿生手的群体 , 进行了一项基于网络的标题和摘要中单词连接性的分析 。 词的连接度是由共现量表搭配(wordA , wordB)=f(wordA , wordB)f(wordA)f(wordB)的得分来定义的 , 这是单词相对于其他单词的配对倾向 。 如果单词或节点在数据库的出版物中同时出现一次 , 则认为它们是连接的 , 节点的大小与出现的频率成正比 , 连接的厚度与分数或共现度量成正比 。 为了检测研究社区 , 使用了Gephi网络可视化的模块化分析 。 通过使用“ForceAtlas2”算法 , 节点被放置在一个平衡的状态 , 以便更好地可视化研究社区的不同集群 。 词共现图的网络分析包括232个节点和472个边 , 所有边都是无向的 。 一些形成孤立社区的嘈杂节点被过滤掉了 。 单词共现图的布局如图7所示 。 为了理解分析 , 表中列出了前50个词 。 pairs在揭示研究领域之间的关系方面提供了丰富的信息 , 例如“防滑”、“体感皮层”、“滑动检测”和“感觉替代”暗示了触觉和仿生手的体感反馈 。 虽然有些词 , 如“电路系统”、“系统人”等 , 并不能提供关于社区的太多信息 , 但它们对社区之间的互连仍然是至关重要的 。 Gephi的模块化分析得出的模块化得分为0.712 , 高于检测不同社区所需的0.3阈值 。 基于节点、边和颜色代码的标签 , 解释了以下四个社区 。
1)假手控制(绿色):一个活跃的社区被发现 , 重点是仿生手的设计和控制 。 相互关联的术语意味着研究小组致力于同时比例直观控制 , 这反过来又赋予了具体化 。 近年来 , 新型多功能手和新的控制模式增加了对先进假肢控制系统的需求 。 大型研究小组集中在假体的控制方面 。
2)生物信号采集(紫色):另一个只关注生物信号采集和信号处理的社区可以被识别 。 研究小组正在研究与生物信号采集相关的问题 , 主要包括电极/传感器的选择、滤波器截止频率、采样率和预处理算法 。
3)脑-机界面康复(橙色):解释一个强大的基于人机界面的康复社区意味着它作为一个研究领域的活跃性 。 神经假肢的发展利用了脑机接口的优点来实现假肢实施例 。 研究群体可以从最近关注机器学习和增强虚拟现实的文献中推断出来 。
4)抓握和感觉反馈(蓝色):可以看到一个关注假手抓握和反馈的社区 。 力和触觉反馈信息有助于防止被抓取物体的滑动和刚度检测 。 感觉信息与自动控制的整合有助于在假体内产生功能上快速的适应性反应 。 然而 , 将反馈与用户和假肢之间的双向接口结合起来 , 用户会感觉更自然 , 增强了稳定的抓握能力 。 研究小组致力于通过有创和无创的双向界面提供体感反馈 。
 文章插图
文章插图
 文章插图
文章插图
为了回答这个问题 , 采用词聚类分析的方法来寻找未来的趋势 。 通过对词源(标题、关键词和摘要的组合词)的综合分析 , 归纳出四个词簇 , 可以代表该领域可能的研究热点 。 可能的研究热点包括:1)控制方法;2)信号采集与处理;3)高效设计;4)修复与实施 。 每年发表的有关研究热点的文章数量如图8所示 。 表列出了标题、虚词、摘要中前25个词出现的频率 , 并将它们作为词源 。 每个热点都有一组词支持 , 例如 , “控制”由“运动控制”、“力控制”、“肌电控制”、“医疗控制系统”等支持;“信号”由“肌电”、“医学信号处理”、“模式识别”、“特征提取”等支撑;“设计”由“生物力学”、“促动器”、“运动学”、“欠驱动”、“机构”等支持;“康复”由“训练”、“虚拟”、“幻觉”、“触觉”等支持 。
- LetsGoDigital分享三星Galaxy S21系列全家桶渲染图
- 3500元内性价比最高的电脑配置方案分享
- 看百年电视产业变迁,与你分享购买激光电视需要注意的事项
- 为什么iPhone能卖一万,并不觉得贵?分享数码博主内心独白
- 微信这些隐藏福利,真的太过分了
- 养生重在平时,随时随地给你按摩!HITH智能足浴器体验分享
- 百度营销|金融行业Q3大盘数据洞察
- 通风好,散热快,而且很好看!九州风神玄冰堡垒套装装机分享
- 好好刷牙,华为HiLink智能电动牙刷,好物分享!
- 好程序员大数据培训分享Hadoop怎样处理数据?