单片机控制电机的原理 关于单片机电机驱动模块
我们平时都用到电机,它是一种把电能转换为机械能的装置,下面我们用实例来说说步进电机和直流电机在控制方式上有什么不同 。今天我们用两个实例来给刚学单片机的小伙伴们说明,两种电机控制方式的不同 。
一、步进电机的控制
步进电机是以脉冲信号电流来驱动,例如步进电机每转一周需要200个脉冲信号来激励,就可以计算出每个励磁信号能使步进电机前进1.8度,其旋转角度与脉冲的个数成正比,而步进电机的正反转有励磁脉冲产生的顺序来控制 。通过以上的原理,我们就可以用程序来控制步进电机了,
1)连接:
(一)将P2.0、P2.1、P2.2、P2.3口分别接到P30(在步进电机模块的左侧)的A、B、C、D上 。
(二)将M3(步进电机驱动模块输出)的A、B、C、D分别接到步进电机的A、B、C、D四相上,步进电机的COM端接到VCC(M3接口标志的VCC)上 。
2)电源:将P35(步进电机驱动模块的左下角)接口用短接冒短接,电源+5V
3)按键命名:与P1低位到高位依次连接的按键一下命名为按键KEY1~KEY8
4)效果:启动程序,步进电机默认停止状态
按键4:步进电机暂停/继续
按键5:步进电机停止/运行
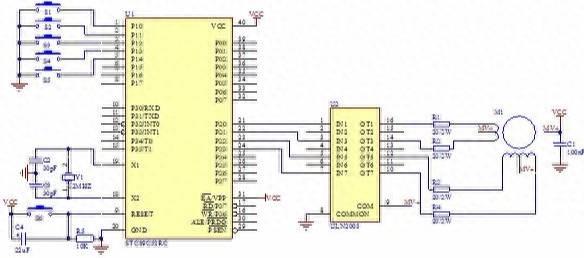
文章插图
步进电机控制原理图
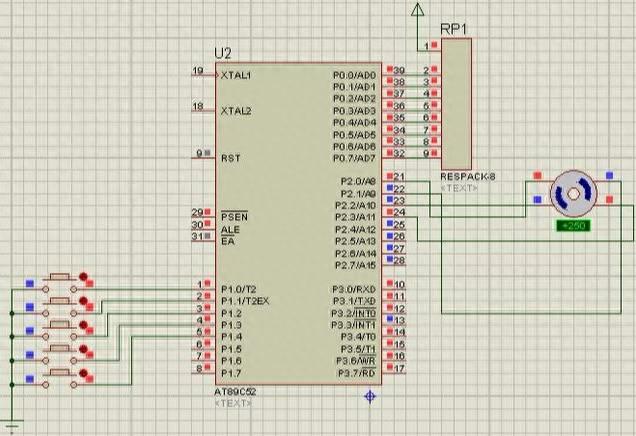
文章插图
步进电机仿真图
#include
#define uchar unsigned char
#define uint unsigned int
#define T0_COUNT 50 //定时器0的计数值
#define KEY P1 //按键控制
#define MOTOR P2 //步进电机接口
sbit LED = P3^3; //LED指示灯
uint count; //节拍计数值
uint count_time; //计时时间
uchar count_beat; //步进电机驱动数组中的数值计数/*A AB B BC C CD D DA*/
uchar forward[8]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09}; //四相八拍 正转
/* A AD D DC C CB B BA*/
uchar reverse[8]={0x01,0x09,0x08,0x0c,0x04,0x06,0x02,0x03}; //四相八拍 反转
bit forward_flag; //电机正反转标志,1:电机正转 0:电机反转
bit stop_flag; //电机停止/运行标志 1:停止 0;运行
bit suspend_flag; //电机暂停/继续标志 1:暂停 0:继续
函数名称:delay_ms软件延时,延时的单位时间在1ms左右
void delay_ms(uint n)
{
uint i;
uchar j;
for(i=0;i<n;i++)
for(j=0;j<120;j++);
}
函数名称:key_scan功 能:按键扫描返 回 值:扫描的结果,”0″为无按键按下、非”0″为按键值
uchar key_scan()
{
uchar temp = 0;
KEY = 0xff;
if(KEY!=0xff)
{
delay_ms(10); //按键消抖
KEY = 0xff;
if(KEY!=0xff)
{
temp = KEY;
while(KEY!=0xff) //等待按键释放
KEY = 0xff;
}
}
return temp;
}
函数名称:key_behav形 参:uchar key_val:按键值功 能:实现按键功能
void key_behav(uchar key_val)
{
switch(key_val)
{
【单片机控制电机的原理 关于单片机电机驱动模块】case 0xfe: //步进电机加速
if((0==stop_flag)&&(0==suspend_flag))
{
count_time -= 10; //减少节拍之间的时间
if(count_time<40)
count_time = 40;
}
break;
case 0xfd: //步进电机减速
if((0==stop_flag)&&(0==suspend_flag))
{
if(count_time<150)
count_time += 10; //增加节拍之间的时间
}
break;
case 0xfb: //步进电机正或反转选择
if((0==stop_flag)&&(0==suspend_flag))
{
forward_flag = ~forward_flag; //切换电机旋转模式
count_beat = 0; //步进电机驱动数组中的数值计数
}
break;
case 0xf7: //步进电机 暂停/继续
if(stop_flag==0)
{
suspend_flag = ~suspend_flag;
if(suspend_flag)
TR0 = 0; //暂停
else
TR0 = 1; //继续
}
break;
case 0xef: //步进电机停止/运行
stop_flag =~ stop_flag;
if(stop_flag)
{ //停止
TR0 = 0; //停止输出
LED = 1; //关闭LED指示灯
count_beat = 0;
count_time = 1000;
forward_flag = 1;
suspend_flag = 0;
}
else
{
LED = 0; //点亮LED指示灯
TR0 = 1; //允许输出
}
break;
default:break;
}
}
函数名称:interrupt_init功 能:中断寄存器初始化 返 回 值:无
void interrupt_init()
{
TMOD = 0x01; //定时器工作方式1
TH0 = (65536-T0_COUNT)/256; //赋值初值
TL0 = (65536-T0_COUNT)%256;
ET0 = 1; //打开定时器 1 中断
- win10显卡控制面板在哪里 显卡管理器的打开步骤
- 单片机最小系统组成有哪些 有关单片机的工作原理
- 局域网远程控制电脑设置 windows10远程桌面连接的办法
- ipad怎么设置屏幕旋转 ipad屏幕旋转控制的办法
- 如何更改MAC地址
- win11显卡控制面板在哪里 电脑没有amd控制面板
- 远程监控电脑屏幕用什么软件 手机如何远程控制另一台电脑
- 管理员已阻止你运行此应用怎么办 win11用户账户控制怎么取消
- 空调开关手机控制的方法 苹果手机怎么开空调万能遥控器
- 怎样控制农药污染