不用摄像头和激光雷达,四足机器人「凭感觉」越野
机器之心报道
机器之心编辑部
近日 , 瑞士 ANYbotics 公司打造的 ANYmal 机器人登上了新一期的《Science Robotics》封面 , 这款机器人的控制器可以使其穿越各种复杂的环境 , 包括溪流、草地、雪地、碎石坡等 , 而且不靠摄像头、激光雷达等常见设备——平衡系统不需要任何外界信息的输入 , 控制模型也不包含人类输入的规则 。 文章插图
文章插图
腿式运动扩展了机器人的应用范围 , 但在地球上一些最具挑战性的环境中 , 大部分腿式机器人依然无能为力 。
多年来 , 瑞士 ANYbotics 公司的团队一直在试图解决这个问题 , 他们的最新研究成果——《Learning quadrupedal locomotion over challenging terrain》登上了新一期《Science Robotics》的封面 。
在这篇论文中 , 他们提出了一种稳健的控制器 , 可以部署到 ANYbotics 旗下多种机器人中 。 有了新型控制器的加持 , 这些机器人可以轻松翻越溪流、草地、雪地、碎石坡等富有挑战的场景 。
我们可以看到 , 这些机器人可以轻松走过小溪:
? 文章插图
文章插图
行走在林间 , 即使是草木丛生的不平坦地面:
? 文章插图
文章插图
在下坡的雪地上行走: 文章插图
文章插图
从有水流过的台阶爬下去:
? 文章插图
文章插图
在这样复杂的环境中行走 , 对于人或动物来说有时也会显得磕磕绊绊 , 要打造能如履平地的机器人 , 难度自不必说了 。
【不用摄像头和激光雷达,四足机器人「凭感觉」越野】「传统的」控制方法已经不够用了
在不平坦的地形上 , 常规腿式运动方法方法使得控制架构越来越复杂 。 许多情况都要依赖复杂的状态机来协调运动原语和反射控制器的执行 。 为了触发状态之间的转换或反射的执行 , 许多系统都明确地预估状态 , 例如地面接触和滑行移动 。 这种预估通常是基于经验设置的 , 并且在存在诸如泥土、雪地或植被等未建模因素的情况下可能会变得不稳定 。 还有一些在脚部使用接触式传感器的系统 , 在野外条件下也会变得不可靠 。
总体而言 , 随着考虑更多场景 , 用于在崎岖等特殊地形上进行腿式运动的常规系统的复杂性不断升级 。 在开发和维护方面变得非常困难 , 并且也容易出现控制器设计无法实现的情况(角落情况) 。
近来无模型强化学习(RL)已经成为腿式机器人运动控制器开发中的一种替代方法 。 强化学习方向的观点是调整控制器以优化给定的奖励函数 。 优化是通过执行控制器本身获取的数据来执行的 , 这会随着经验的增加而改进 。 强化学习已经用于简化运动控制器的设计 , 自动化设计过程的各个部分以及学习之前的方法无法设计的行为 。
但是 , 将强化学习用于腿式运动在很大程度上仅限于实验中的环境和条件 。 此前的研究实现了运动和恢复行为的端到端学习 , 但仅限于在实验室的平坦地面上进行 。 其他研究也开发了用于腿式运动的强化学习技术 , 但同样是在实验的环境中 , 主要集中在平坦或带有中等纹理的表面上 。
ANYbotics 的研究者提出了一种稳健的控制器 , 用于在充满挑战的地形上进行盲四足运动 。 该控制器仅使用联合编码器和惯性测量单元的本体感受(proprioceptive)度量 , 这是腿式机器人上最耐用最可靠的传感器 。 控制器的操作如下图所示 。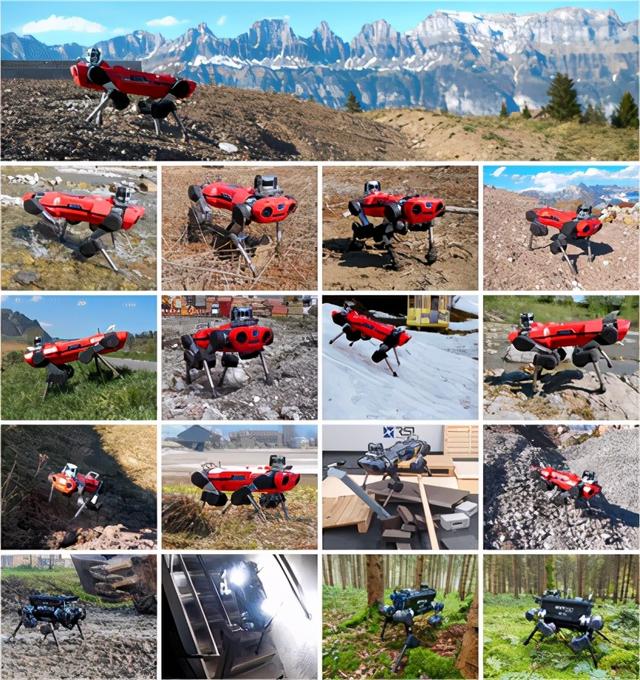 文章插图
文章插图
该控制器被用于 ANYmal 四足机器人的两代版本中 。 四足机器人在泥土、沙子、瓦砾、茂密的植被、雪地、水中和其他越野地形中安全地小跑 。
研究人员介绍说 , 这个控制器由一种神经网络策略驱动 , 在模拟环境中进行训练 。 虽然没有任何现实世界的数据和精确的地形模型 , 该控制器仍然能克服野外的各种不规则地形 。 研究人员还强调说 , 「我们的系统可以穿越视频所示的所有地形 , 而且一次都没有摔倒 。 」
此外 , 这项研究中提到的方法并没有用到摄像头、激光雷达或接触式传感器信息 , 只依赖本体感受传感器信号(proprioceptive sensor signal)来提高控制策略在不同地形中的适应性和稳健性 。
- 中国|浅谈5G移动通信技术的前世和今生
- 芯片|华米GTS2mini和红米手表哪个好 参数功能配置对比
- 桌面|日常使用的软件及网站分享 篇一:几个动态壁纸软件和静态壁纸网站:助你美化你的桌面
- 二维码|村网通?澳大利亚一州推出疫情追踪二维码 还考虑采用人脸识别和地理定位
- Pro|iPhone 12 Pro新版本亮相 机身镀金竟取消后置摄像头
- 不到|苹果赚了多少?iPhone12成本不到2500元,华为和小米的利润呢?
- 机器人|网络里面的假消息忽悠了非常多的小喷子和小机器人
- 华为|骁龙870和骁龙855区别都是7nm芯片吗 性能对比评测
- 花15.5亿元与中粮包装握手言和 加多宝离上市又进一步?|15楼财经 | 清远加多宝
- 摄像头|摄像头造型别出心裁 realme全新手机设计专利曝光