激光三角测量法在工业视觉检测上的应用( 二 )
需要已知如下信息:
- 物体大小(长、宽、高)
- X , Y , Z方向精度要求
- 扫描速度
- 应用类型
- 材质
- 相机选择
相机能达到的最大行频 , 取决于ROI有效区域的大小、曝光时间和轮廓提取算法等 。 而ROI有效区域的大小又取决于材料的厚度范围 , 曝光时间一部分取决于材料的材质(有的材料比如橡胶轮胎为黑色吸光的材质 , 在同等光源亮度情况下 , 需要的曝光时间要高一些)
2)镜头选择
这个跟2D一致 。 主要取决于现场安装的工作距离 , 焦距越大工作距离越远
3)搭接方式
如上所述 , 各有利弊 , 可以从标定的难易程度、检测精度、平面物体的材质等多个因素考虑选择哪种方式
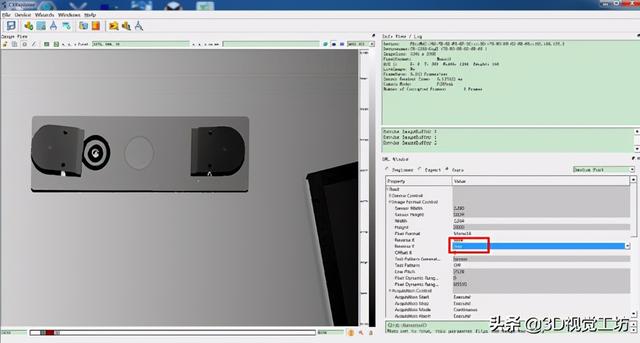
4.2采图当相机和激光角度固定时 , 相机安装方向的不同会导致灰度极性的不同(即高度越高的物体 , 对应的灰度值越亮还是越暗) 。 简单总结:相机自身安装是有方向的 , 若激光在相机的正方向的上面 , 则高度越高的物体 , 对应的灰度值越低;否则对应的灰度值越高 。
基于此 , 如果想改变灰度极性 , 在不更改相机安装方向的情况下 , 可以通过设置ReverseY参数来更改 。
 文章插图
文章插图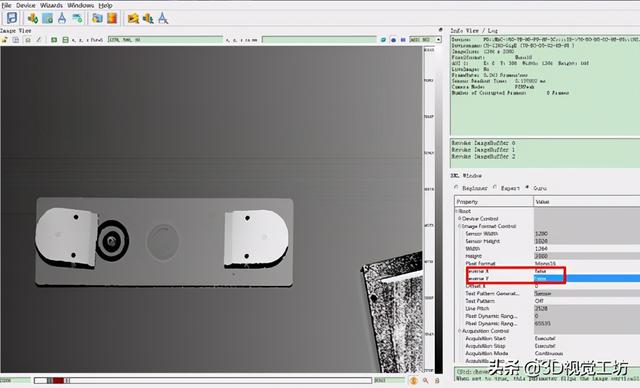 文章插图
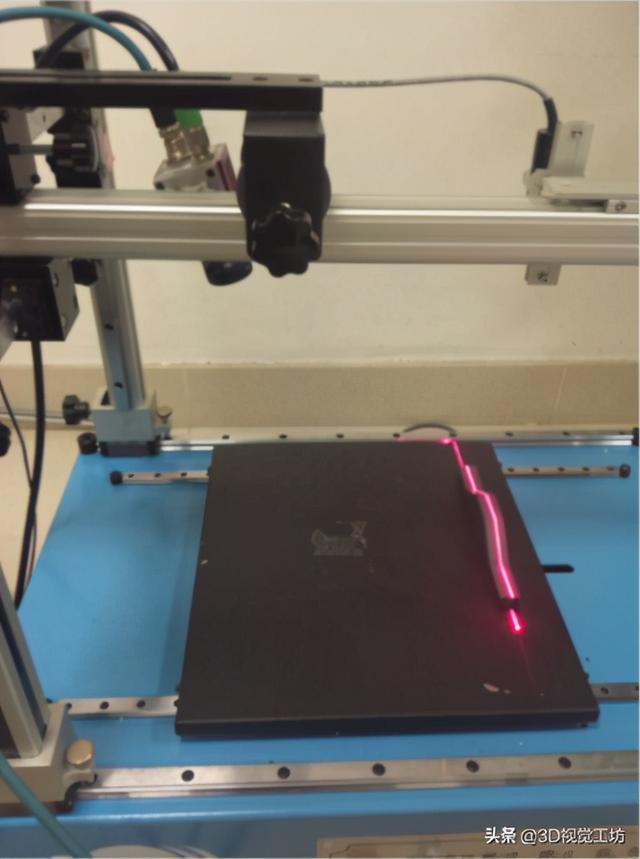
文章插图4.3标定标定的目的:获得相机内外参数、以及激光光平面的方向 。 进而可以计算出物体X和Z向的物理单位大小 。 3D相机一般集成了现成的标定模块 , 所以标定起来比较容易 , 经常用的标定方法为:锯齿形标定板
 文章插图
文章插图通过在运动方向上移动标定块 , 调用相机自身的标定算法 , 来实现对3D相机的标定 。
本文仅做学术分享 , 如有侵权 , 请联系删文 。
下载1
在「计算机视觉工坊」公众号后台回复:深度学习 , 即可下载深度学习算法、3D深度学习、深度学习框架、目标检测、GAN等相关内容近30本pdf书籍 。
下载2
在「计算机视觉工坊」公众号后台回复:计算机视觉 , 即可下载计算机视觉相关17本pdf书籍 , 包含计算机视觉算法、Python视觉实战、Opencv3.0学习等 。
下载3
在「计算机视觉工坊」公众号后台回复:SLAM , 即可下载独家SLAM相关视频课程 , 包含视觉SLAM、激光SLAM精品课程 。
- 创意|wacom one万与创意数位屏测评
- iPhone|折叠屏iPhone要来?曝苹果开始测试|OPPO Reno5真机曝光
- 承受|折叠屏iPhone已开始测试?要求能承受10万次折叠,或在2年后发布
- 华为|骁龙870和骁龙855区别都是7nm芯片吗 性能对比评测
- 效果|周冬雨化身美妆效果评测员?相比美妆数码宅的我更期待OPPO新机
- 手机|新鲜评测:让手机变身电脑的显示器见过没?只用4步即可完成!
- 操作|[LIVE On]黄敏贤和郑多彬充满心碎的下午:机器操作每次都不能通过测试
- 一加9和华为p40哪个好 一加9和华为p40对比区别评测
- 测试阶段|折叠 iPhone 终于要来了,已经进入测试阶段~
- X50|vivo X50 Pro+深度测评:全能影像机皇登场