FANUC机器人示教编程:原始路径恢复功能介绍与使用方法
概要原始路径恢复功能 , 是在机器人运行过程中 , 程序动作由于某种原因被暂停的情况下 , 当机器人再次启动运行时首先恢复到暂停时位置的一种功能 。 比如 , 在暂停后通过手动运行方式使得机器人发生了移动 , 当再次启动机器人运行时 , 首先使机器人返回通过手动移动前的位置 , 然后再继续进行后续的动作 。
一般地 , 将程序再次启动运行时 , 机器人从手动移动后的位置返回到原始运行轨迹上的停止位置的动作叫做“再启动动作”;将从原始运行轨迹停止位置起运行后续部分路径轨迹的动作叫做“恢复动作” 。 因此 , 再启动动作返回的终点位置 , 就成为了恢复动作的起点位置 。
机器人停止方式机器人运行过程中的停止有多种原因 , 但是 , 无论是何种原因导致的停止 , 机器人都会以两种方式停止运行 , 也就是减速停止与瞬时停止 。
减速停止:一种机器人逐渐减速的、柔和的停止方式 , 这种停止方式通常不伴随伺服电源切断的报警发生 , 比如机器人接收到暂停输入信号的停止 。
瞬时停止:一种机器人没有减速过程的、急促的停止方式 , 这种停止方式通常伴随伺服电源切断报警的发生 , 比如机器人接收到急停输入信号的停止 。
原始路径恢复的设定原始路径恢复功能的打开与关闭是通过对机器人系统变量“$SCR.$ORG_PTH+RSM”的参数设定决定的 , 当变量参数设定为“TRUE”时 , 表示原始路径恢复功能有效;当变量参数设定为“FALSE”时 , 表示原始路径恢复功能无效 。 设定操作方法以下详细介绍 。
示教器的操作面板按“MENU”键 , 在弹出的MENU1菜单中选择“0--下页--” , 然后按“ENTER”键 。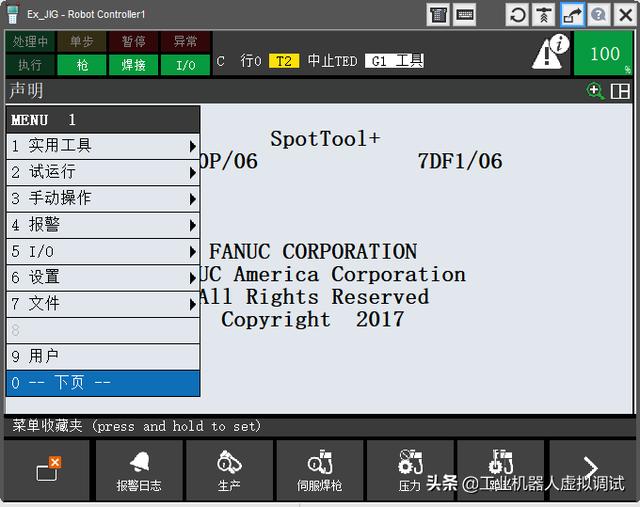 文章插图
文章插图
MENU2菜单中依次选择“6 系统”→“2 变量” , 然后按“ENTER”键 。 文章插图
文章插图
在系统变量界面中选择“610 $SCR” , 然后点击下方的“详细” 。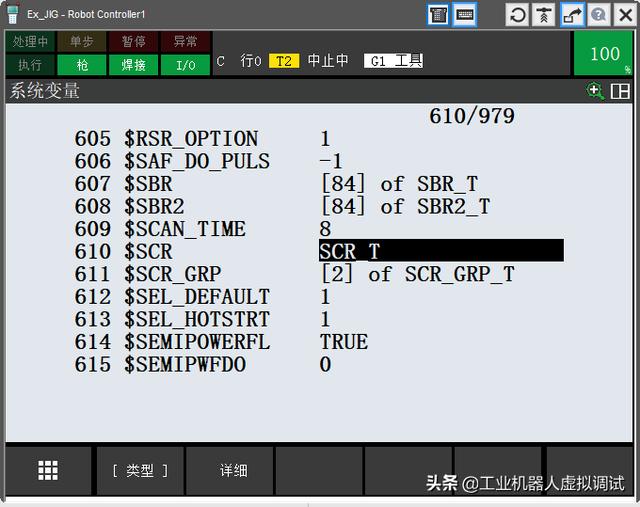 文章插图
文章插图
在$SCR系统变量详细界面中 , 选择“137 $ORG_PTH_RSM” , 然后可以通过下方的“有效”、“无效”来切换原始路径恢复功能的打开与关闭 。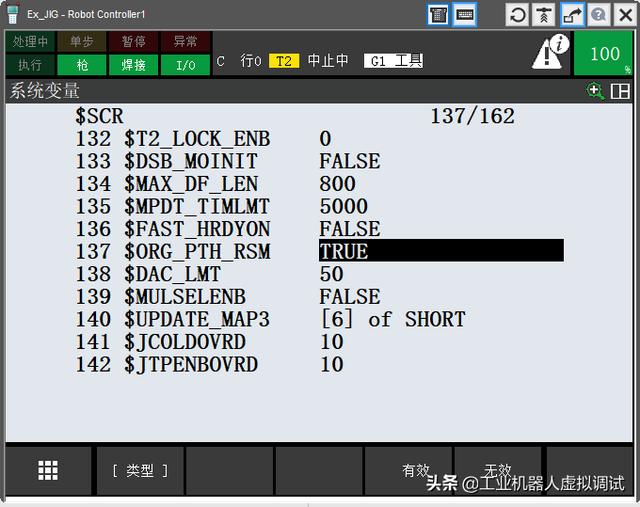 文章插图
文章插图
默认情况下 , 机器人的原始路径恢复功能已经被设定为有效 , 但是根据机器人型号、工艺包以及其他选项功能的不同 , 此功能也会被设定为无效 。 如果默认情况下此功能已经被设定为无效时 , 那么一定要经过专业人员指导后再将其设定为有效 。
减速停止后的再继续轨迹在暂停信号输入或发生减速停止报警时 , 机器人在保持伺服电源上电的状态下 , 在运行轨迹上减速停止 , 程序进入暂停状态 。 假设此时用户为确认机器人或周边设备的状况而手动移动了机器人 。 而后 , 再继续启动运行程序时 , 将出现以下两种运行情况:
若是原始路径恢复功能无效 , 则机器人将以当前位置为起始点重新计算路径轨迹 , 并执行后续的动作程序 , 最终形成与原始运行轨迹不同的路径轨迹 。
若是原始路径恢复功能有效时 , 则机器人将首先执行运行到减速停止后的停止位置的再启动动作 , 然后以停止位置为起始点进行后续的恢复动作 。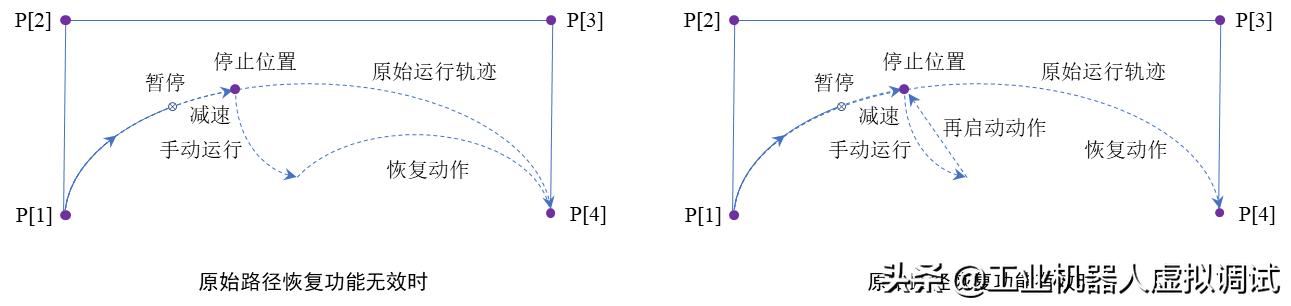 文章插图
文章插图
瞬时停止后的再继续轨迹因急停信号输入等原因造成机器人瞬时停止时 , 在伺服电源断电后 , 因机器人自身、负载的惯性以及重力的影响 , 机器人会发生惯性移动 , 进而偏离原始运行轨迹 。 而后 , 在解除急停等报警后 , 再继续启动运行程序时 , 也将出现以下两种运行情况:
若是原始路径恢复功能无效 , 则机器人将以当前位置为起始点重新计算路径轨迹 , 并执行后续的动作程序 , 最终形成与原始运行轨迹不同的路径轨迹 。
若是原始路径恢复功能有效 , 则机器人将首先执行运行到导致急停的位置(或者发生报警的位置)的再启动动作 , 然后从该位置起进行恢复动作 。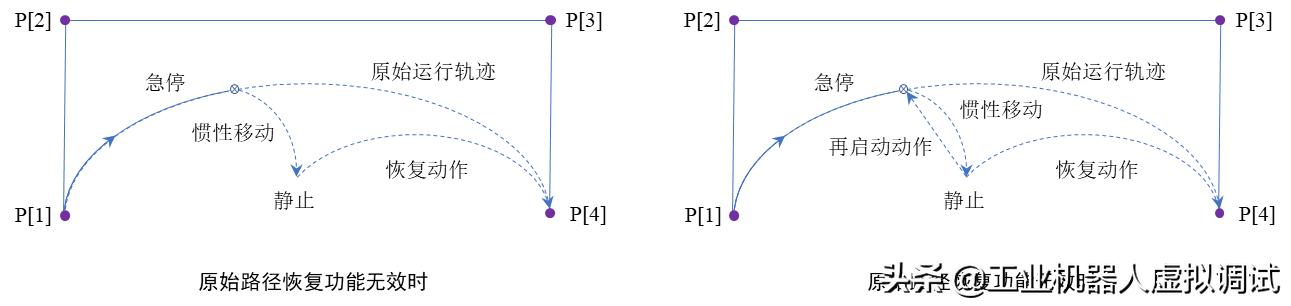 文章插图
文章插图
特殊情况下的恢复轨迹再启动动作中再次暂停后手动运行:机器人处于再启动动作中 , 再次暂停后手动运行了机器人 。 重新启动运行时 , 再启动动作将是直接向着最初的停止位置的动作 , 而不会变为向着紧靠其在再启动动作中的停止位置移动的动作 。
- 机器人|网络里面的假消息忽悠了非常多的小喷子和小机器人
- 跑腿|机器人“小北”上岗 让办事群众少跑腿
- 机器人|外骨骼康复训练机器人助力下肢运动功能障碍患者康复训练
- 教学|机器人教学的目标方案
- 体验|VR\/AR体验、3D打印、机器人“对决”……松江这所中学人工智能创新实验室真的赞
- 输送|新时达:“用于机器人码垛的输送系统”获发明专利
- 顶级|内地高校凭磁性球体机器人首获机器人顶级会议最佳论文奖
- 康复|五莲县康复医院引进全省首台康复机器人
- 地面|莱茵金属公司推出,用于武装侦察的新型地面机器人
- ABB机器人如何与外部通信(devicenet设置)