腾讯造「国产」机器狗,花式走梅花桩( 二 )
据腾讯 Robotics X 实验室介绍说 , 这款自平衡轮式机器人的控制分为「行进中的动态自平衡」和「停止行进时的静态自平衡」 。
?
行进中的动态自平衡是依靠前把转动进而带动车身的转动实现;停止行进时的静态自平衡则采用动量轮力矩平衡技术 , 应用角动量守恒的原理实现自平衡控制 。
在视频展示中 , 自平衡机器人可以实现前行中的「拐弯」等方向调整的动作 文章插图
文章插图
在行驶过程中 , 即使受到严重外界干扰 , 比如莫名飞来的足球砸到后轮 , 小车也能岿然不动: 文章插图
文章插图
?
面对减速带的阻拦 , 它能够以合理的速度保持平稳行驶: 文章插图
文章插图
以及 , 掌握了较强的上下坡、过桥能力: 文章插图
文章插图
完整的演示视频如下:
?
腾讯也介绍了与这款自平衡轮式机器人相关的背后技术 。 在近日举行的 IROS 2020 大会上 , 腾讯 Robotics X 实验室该项目的两篇研究被接收为 Oral 论文 。 文章插图
文章插图
论文地址:
在这篇文章中 , 研究者使用非线性控制技术来扩大无人自行车的稳定域 。 研究者考虑了两种情况 。 在第一种情况中 , 无人自行车使用飞轮保持平衡 , 转角设置为 0 , 飞轮的扭矩用来控制输入 。 该控制器基于级联与阻尼的无源控制法 (IDA-PBC)。 对于第二种情况 , 无人自行车使用车把保持平衡 , 且行驶速度很快 。 车把的角速度用来控制输入 , 平衡控制器是基于反馈线性器设计的 。 基于 Lyapunov 稳定性理论 , 研究者从理论上证明了闭环无人自行车的整体稳定性 , 且在实验中验证了所提出的非线性平衡控制器的效果 。 文章插图
文章插图
论文地址:
在第二篇论文中 , 研究者使用增益规划技术设计了一个有惯性轮的无人自行车平衡控制器 。 根据自行车的静止和运动这两个状态 , 需要两个不同的控制器 。 该研究建立了一个物理系统 , 并在实验中证明了增益规划控制器的效果 。
腾讯 Robotics X 实验室
腾讯 Robotics X 实验室于 2018 年成立 , 致力于推进人机协作的下一代机器人研究 , 打造虚拟世界到真实世界的载体与连接器 。
目前 , 实验室主攻移动、灵巧操作和智能体等三大通用机器人技术的研究与应用 , 并聚焦于多模态移动机器人的研发 。 其中 , 移动是机器人最基础的能力之一 , 此次发布的两项进展就属于移动方向 。 而移动方向又可分为四个技术模块:机械设计、感知、运动规划与控制、整机系统设计与搭建 。 前三者可以理解为机器人的躯干、眼睛和大脑 , 最后一项可以理解为它的各「器官」协调的能力 。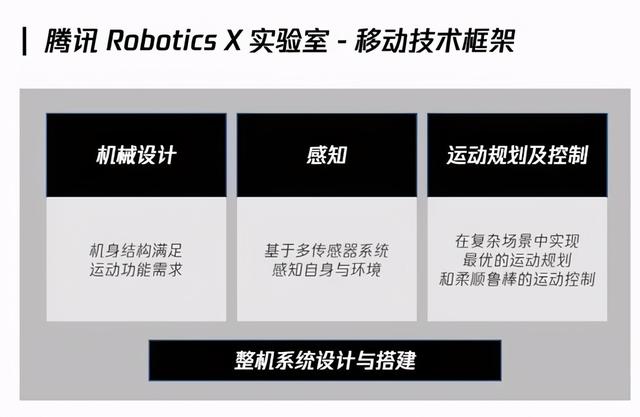 文章插图
文章插图
该实验室还与腾讯 AI Lab 构建了「AI + 机器人」的双基础布局 , 能协同思考如何真正连接虚拟和现实世界 , 并攻克终极难题——通用人工智能 。
腾讯 Robotics X 与腾讯 AI Lab 实验室主任张正友博士表示:「移动或运动能力 , 是机器人最核心、也是最基本的能力之一 , 决定了它能去到什么场景 , 做什么事情 , 未来有什么样的想象力 。 我们很高兴能看到这两项进展 , 并将继续深入探索机器人的通用能力 , 为虚拟到真实世界搭建一个有力的桥梁 。 」
参考链接:
【腾讯造「国产」机器狗,花式走梅花桩】;wfr=spider&for=pc
- 国外|坐拥77件专利,打破国外的垄断,造出中国最先进的家电芯片
- 车企|华为不造车!但任正非加了一个有效期,3年
- 世代|Z星球——腾讯布局Z世代教育社交的新尝试
- 摄像头|摄像头造型别出心裁 realme全新手机设计专利曝光
- 中国|意大利制造求助中国网站,意外交部长出马见证
- 展开|天地在线联合腾讯广告在京展开“附近推” 构建黄金5公里营销体系
- 重庆市工业互联网技术创新战略联盟:构建万物互联智能工厂 助力先进制造发展
- 合并|Andre Cronje主导批量「合并」DeFi项目,是好事情吗?
- 任正非|任正非:“谁再建言造车,直接调离岗位!”华为为何这么做?
- 注册|阿里申请注册“爆改吧!小店”商标,打造线下特色实体小店