扫地机器人避障方案解析:谁优谁劣?双目玩法有何不同?
扫地机器人的避障方案当属老生常谈的话题了 。
——原始的随机碰撞
犹记得早年的扫地机器人常常使用原始的距离传感方案 , 依靠避震的橡胶材料结合随机运动路线在室内碰撞 , 检测撞击到障碍物时就随机转向 , 直到碰到下一个障碍物再次转向 , 如此类推完成一次又一次的清扫 。
这种方案原始、简单、粗暴 , 有适合它的场景——极为狭小的室内空间 , 不过一旦遇到正常面积的房间时 , 其低效的缺陷便会显现 。
——3D结构光
3D结构光方案是在iPhone将之用于Face ID之后而广为人知 , 这是一种主动光学测距方案 , 由发射端和接收端两部分组成 。 这种方案的精度比较高 , 通常会要求结构光的发射端不能够包含编码的光斑 , 然后由接收端捕获投射出的光斑 , 根据光点的形变计算距离 。
当然 , 代价是成本相当高 , 测量距离也受接收端到发射端的距离影响 。 而且强光环境下表现差 , 容易受环境光线影响 。 文章插图
文章插图
——3D TOF方案
ToF技术本身是一种测距实现方法 , 要测得与场景中某个对象的距离 , 由ToF模组的光源向该对象发出光 。 光在发出后抵达该对象 , 并反射回到ToF模组的传感器 。 计算这期间“光的飞行时间” 。
【扫地机器人避障方案解析:谁优谁劣?双目玩法有何不同?】而3D ToF是将ToF的单点扩展到多点 , 通常在相同体积的模组内 , 测量距离大于结构光 。 也能在强光或者暗光环境下工作 , 不受环境光线影响 , 然而3D ToF的劣势对于扫地机器人比较致命——分辨率低 , 图像信息不易辅助避障 。 文章插图
文章插图
常见于iPad Pro的3D ToF镜头
——激光雷达
激光雷达避障的原理是发射激光到物体表面 , 然后接收物体的反射光信号 。 而且激光避障的精度、反馈速度、抗干扰能力和有效范围都要明显优于红外和超声波 。 劣势在于单束 LIDAR 通过旋转可以扫描一个面的数据(LDS) , 无法完成对三维世界的感知 。
但无可否认的是 , 这是目前扫地机器人当中的主流方案 , 比如石头扫地机器人T7就是应用的该方案 。 文章插图
文章插图
——视觉避障
目前市场上大多数搭载单目视觉识别系统的扫地机器人只能捕捉二维信息 , 缺乏空间感 。 而且单个摄像头的图片信息无法获判断场景中每个物体与镜头的距离关系 , 缺少第三个维度 , 也就是景深信息 , 可能会计算错物体的实际距离 。
那么有没有搭载双目系统的扫地机器人?石头扫地机器人T7 Pro便是 。 它和石头扫地机器人T7有着完全一致的2500Pa超强吸力、297ml的恒压电控水箱 , 差异之处就是这超前的避障系统:更具体点来说 , 石头扫地机器人T7 Pro采用的是LDS激光雷达+双目方案 , 在视觉部分 , 与单目相比 , 它能够捕捉物体的景深信息 。 文章插图
文章插图
值得一提的是 , 在去基带版的“骁龙625”的加持下 , 石头扫地机器人T7 Pro还能够运行AI 物体识别算法 , 对周围环境的障碍物进行属性识别和分析 , 根据不同属性的障碍物采取不同的主动避障方案 , 兼顾清扫覆盖度和避障成功率 。
目前石头扫地机器人T7 Pro已经支持体重秤、风扇/吧台椅底座、鞋子、插线板、线团、“粑粑”、织物(袜子)等9 类家庭常见障碍物 。
不止于此 , 在摄像头内部的红外补光灯(肉眼不可见)的作用下 , 石头扫地机器人T7 Pro还可以实现暗光环境下的避障 。 无论是白天还是夜间 , 扫地机器人在双目系统加持下的避障、脱困相比单目系统都会有显著改善 。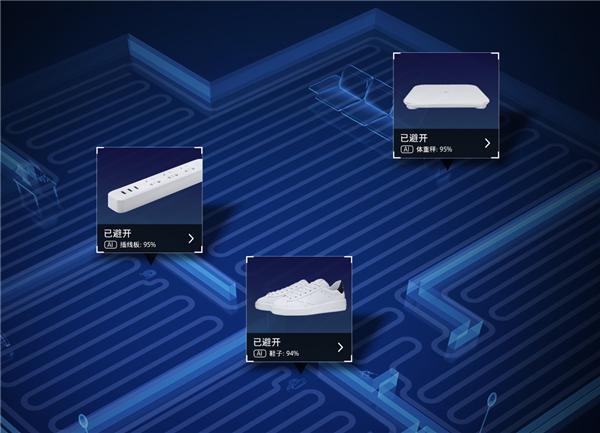 文章插图
文章插图
对于家用的扫地机器人而言 , 加入更多传感器辅助工作 , 一定是智能程度、功能性进化的重要方向 。 所以能够预见的是 , 未来的扫地机器人为了实现更高的智能化水平 , 配备的传感器会更为多样 , 当前来看石头扫地机器人T7 Pro确实是走在了最前沿 。
从实际效果来看 , 石头扫地机器人T7 Pro搭载的视觉系统方案所实现的效果综合付出的代价成本 , 相比较已有的其它方案 , 都有相当的优越性 , 在接下来相当长的时期之内 , 也不无可能发展成未来主流扫地机器人的重要感知方案 。
- 机器人|网络里面的假消息忽悠了非常多的小喷子和小机器人
- 跑腿|机器人“小北”上岗 让办事群众少跑腿
- 机器人|外骨骼康复训练机器人助力下肢运动功能障碍患者康复训练
- 教学|机器人教学的目标方案
- 体验|VR\/AR体验、3D打印、机器人“对决”……松江这所中学人工智能创新实验室真的赞
- 输送|新时达:“用于机器人码垛的输送系统”获发明专利
- 顶级|内地高校凭磁性球体机器人首获机器人顶级会议最佳论文奖
- 康复|五莲县康复医院引进全省首台康复机器人
- 地面|莱茵金属公司推出,用于武装侦察的新型地面机器人
- ABB机器人如何与外部通信(devicenet设置)