康奈尔可拉伸传感器可重新定义软机器人和虚拟现实技术
【康奈尔可拉伸传感器可重新定义软机器人和虚拟现实技术】康奈尔大学的研究人员利用廉价的LED和染料创造了一种光纤传感器 , 最终制造出一种可拉伸的皮肤状材料 , 能够检测变形 , 包括压力、弯曲和应变 。 该传感器可以参与实现软性机器人系统应用 , 并可能助力增强现实技术 , 因为软性可穿戴传感器可以让增强现实用户感受到与现实世界类似的感觉 。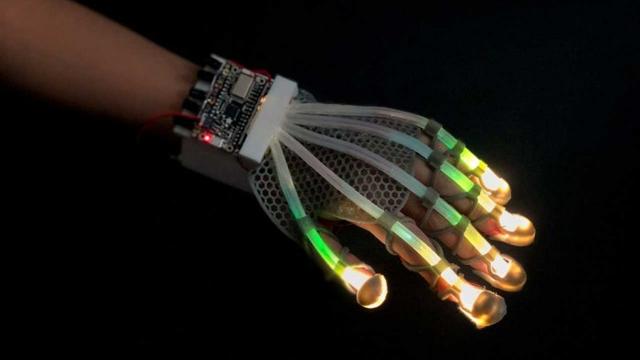 文章插图
文章插图
该技术还有其他应用 , 研究人员目前正致力于将该技术商业化 , 用于物理治疗和运动医学 。 他们的工作建立在之前Rob Shepherd实验室创建的可拉伸传感器工作的基础上 。
早期的可拉伸传感器技术出现于2016年 , 使用通过光波导和光电二极管发送的光来检测光束强度的变化 , 以确定材料是否变形 。 对于新项目 , 研究人员Hedan Bai从基于二氧化硅的分布式光纤传感器中获得灵感 , 该传感器能够检测微小的波长变化 , 以此来识别多种属性 , 包括湿度、温度和应变的变化 。
然而 , 硅纤维与柔软和可拉伸的电子产品不兼容 , 解决的办法是制作一种用于多模态传感的可拉伸光导(SLIMS)传感器 。 这是内置一对聚氨酯弹性体芯子的管路 , 其中一个芯是透明的 , 另一个芯在多个位置填充了吸收染料 , 并连接到一个LED , 每个芯都连接着一个红绿蓝传感器芯片 , 能够记录光的光路的几何变化 。
双核心设计增加了传感器可用于检测一系列变形的输出数量 , 包括压力、弯曲或伸长 , 它通过点亮作为空间编码器的染料来指示变形 。 该技术与一个数学模型相配合 , 能够将不同的变形解耦 , 并精确地确定它们的确切位置和幅度 。 这种传感器可以使用分辨率较低的小型光电子器件工作 , 使其成本更低 , 更容易制造和集成到系统中 。
这种传感器还可以被整合到机器人的手部 , 例如VR/AR用户的可穿戴手套中 。
- 长安|长安傍上华为这个大腿,市值暴涨500亿!可见华为影响力之大?
- “树标提质”提升“软实力”数字经济时代创新载体大有可为
- 自动驾驶汽车|海外|自动驾驶无法可依?美国多个团体联合发布自动驾驶立法大纲
- 恢复|电脑文件不小心被删除了怎么恢复?文件恢复可以用这招解决!
- sd|sd卡修复工具有哪些?两个办法就可以搞定了
- 董事|运达科技:独立董事对相关事项的事前认可意见
- 手机|新鲜评测:让手机变身电脑的显示器见过没?只用4步即可完成!
- 手机|原来微信一键就能拼接长图,朋友圈可发送几十张照片,涨知识了
- 需求|需求下降!传三星可能停售高端Galaxy Note智能手机,重心转移至可折叠手机
- 推出|三星可能会推出一款名为“Galaxy Smart Tag”的追踪器