机器人|扫地机器人“离家出走”的真实原因找到了:差个自动驾驶算法( 二 )
其中就包括 LDS(激光雷达)。
当双目视觉算法遇上激光雷达(能搞定所在高度的平面避障),在二者的结合之下,机器人不仅能完美避开 3cm 以上的障碍物,还能通过它们 " 找准自身定位 "。
此外,激光雷达也会用在 SLAM 的建图和定位上。
3cm 以下:目标检测算法的最强 " 辅助 "
不过,在实际应用中,单靠双目视觉算法和激光雷达,还远远不够。
小于 3 × 5 厘米的物体,会比较麻烦,既要区分出要清扫的部分(纸屑、地毯)、又要避开一些容易缠住的障碍(数据线)。
这种情况下,双目视觉算法就成了最好的 " 辅助 ":协助目标识别算法,将需要避开的物体检测出来,准确地区分垃圾与障碍物。
目标检测模型上,T7 Pro 自研的神经网络借鉴了 SSD,YOLO,及 CenterNet 等多种新型模型,目前还在不断地迭代。
算法上,石头采用了 " 一分为二 " 的待遇:高于 3 厘米的物体,绕障碍物边沿避障和清扫;
小于 3 厘米的物体,按种类进行清扫(纸屑、地毯)或避障(宠物便便、数据线)。
数据集上,石头也 " 别有用心 ":选出了一些特殊的物体,进行 " 有差别对待 "。
例如,大家都有所担心的动物便便,石头 T7 Pro 的算法中直接加入了便便的识别(同情做数据集的一秒钟),在接触之前,远远地就避开它。
哪怕不在家,扫地机器人也不会把宠物便便拖得满地都是。
文章插图
虽然算法目前已经迭代到了能够识别9 种物体的 " 体量 "(还在增加 ing),但不是所有的物体都像宠物便便这样,会受到 " 远远避开 " 的待遇。
9 类常见障碍物:底座类(吧台椅、风扇、手持底座、平底座、灯底座)、体重秤、线团、插线板、鞋子、粑粑、织物(如袜子)、易卡家具( 如 U 型椅)、簸箕
例如鞋子、风扇这种相对较为安全的物体,离得近一点再避障也没什么问题(推开一点不重要,扫干净就行)。
以及,这部分算法还有个小彩蛋。
在你上班的时候,这个扫地机器人就能化身小管家," 监督 " 宠物:是不是又把食盆打翻了?
不过,视频只有直播,没有云存储,也就是说,其他人甚至没办法窃取你家的数据,所以,不用担心扫地机器人会 " 变身间谍 "。
继续 " 拆解 " 后的发现
从深度感知部分来看,扫地机器人深度感知的原理,与无人驾驶算法有着相似之处:
如下图,算法包含三大部分,第一部分是传感器数据的获取,第二部分是信息的提取,第三部分是独特导航算法的融合(后融合)。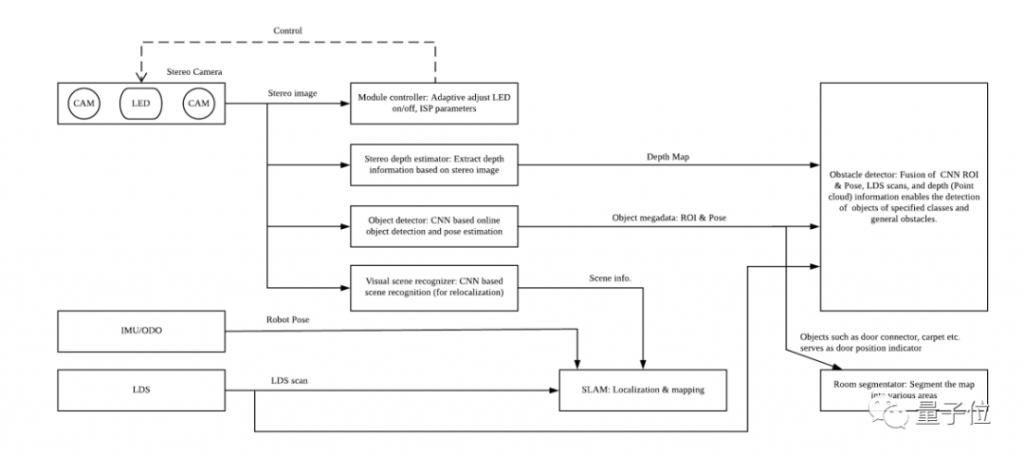
文章插图
但这并不意味着,扫地机器人的算法与无人驾驶汽车的算法一样。
在实际应用上,扫地机器人需要 " 近距离避障 "(晚点刹车,扫得更干净),自动驾驶汽车则相反,需要以 " 安全 " 为主(尽早刹车)。
所以,虽然二者的避障核心都是自动驾驶中的双目视觉算法,但数据处理方式不同。
从根本上来说,它们都是智能机器人,为了让生活变得更方便而存在。
" 智能,让人们更聚焦于生活 "
石头科技 CTO、本硕毕业于浙大的吴震,在接受量子位采访时表示,基于用户场景持续迭代,扫地机器人才能更好地适应千家万户的多样性。
文章插图
△石头科技 CTO 吴震
例如,内测的时候,先对身边的人 " 下手 ":
在我们第一代产品内测时,我们发现有一位同事家里,一件老家具很容易卡住机器人。
后来我们就给这位同事买了一件相似的新家具,然后把这件老家具搬到实验室,作为我们标准测试项目。
而扫地机器人被发明出来的初衷,本质上与无人驾驶汽车一样,目的是将人类从劳动(驾车、琐碎的家务等)中解放出来,聚焦于生活。
吴震相信,伴随着计算机视觉的发展,智能机器人的视觉算法也会变得越来越完善。
" 扫地机器人,在我们看来是机器人技术在家庭环境下的第一个应用,但不会是最后一个。它不是终点,而是开始、是未来。"
文章插图
期待这些未来的智能机器人,能(让我们变得更懒)更加解放我们的双手。
【来源:量子位】
【 机器人|扫地机器人“离家出走”的真实原因找到了:差个自动驾驶算法】声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本网联系,我们将及时更正、删除,谢谢。 邮箱地址:newmedia@xxcb.cn
- 空调|让格力、海尔都担忧,中国取暖“新潮物”强势来袭,空调将成闲置品?
- 同比|亚马逊公布“剁手节”创纪录战绩:第三方卖家全球销售额超48亿美元 同比大增60%
- 闲鱼|电诉宝:“闲鱼”网络欺诈成用户投诉热点 Q3获“不建议下单”评级
- 人民币|天猫国际新增“服务大类”,知舟集团提醒入驻这些类目的要注意
- 产业|前瞻生鲜电商产业全球周报第67期:发力社区团购!京东内部筹划“京东优选”
- 技术|做“视频”绿厂是专业的,这项技术获人民日报评论点赞
- 互联网|苏宁跳出“零售商”重组互联网平台业务 融资60亿只是第一步
- 面临|“熟悉的陌生人”不该被边缘化
- 研发|闽企制伞有“功夫”项目入选国家重点研发计划
- 逛逛|淘宝内容化再升级:“买家秀”变身“逛逛”试图冲破算法局限