机器人|扫地机器人“离家出走”的真实原因找到了:差个自动驾驶算法
这家公司,竟然将自动驾驶算法用在了他们的扫地机器人上。
大材小用?
还真没有,虽然道路交通很复杂,但家里也一样。
不仅要在靠近柜脚床脚时减速,还要在 " 看见 " 障碍物(掉在地上的袜子、缠绕的数据线)时来个急刹车。
文章插图
还得肩负起逗猫遛狗的责任,给上班的你直播宠物的 " 作案现场 "。
文章插图
问题来了,机器人想要避开物体(如数据线、猫狗),用目标检测算法不就行了?
但目标检测算法只能识别已知物体,无法识别、测量未知物体的距离。
想让机器避障,除了检测特殊目标,还需要自动驾驶技术中的一项核心算法三维感知,即判断障碍物距离和三维尺寸(体积大小)的能力。
人眼会下意识地判断物体与自己的距离。
机器要想 " 学会 " 这种能力,同样需要先拥有 " 眼睛 "。
文章插图
自动驾驶避障核心:双目视觉算法
深度感知用到的测距方法有很多,包括红外、超声波、激光、3D 结构光、3D ToF、单目视觉、双目视觉等。
那么,为什么要选择双目视觉算法?
简单来说,就是让机器像人一样,用两只眼睛看世界,产生 " 深度 " 感。不然,机器人看着你和身后的花瓶,会认为是你正顶着一个花瓶,而不会产生 " 深度 " 感。
文章插图
△错位图
如果只有单目(只用一只眼睛,利用时间和判定框大小变化去测量距离)的话,机器也有办法判断距离,但就与人一样,没办法判断得那么精确。
例如,左右手各举一支笔,在闭上一只眼睛后,试着将笔尖对笔尖——是不是容易对不上?因为距离感变差了,所以笔尖总是容易互相错过。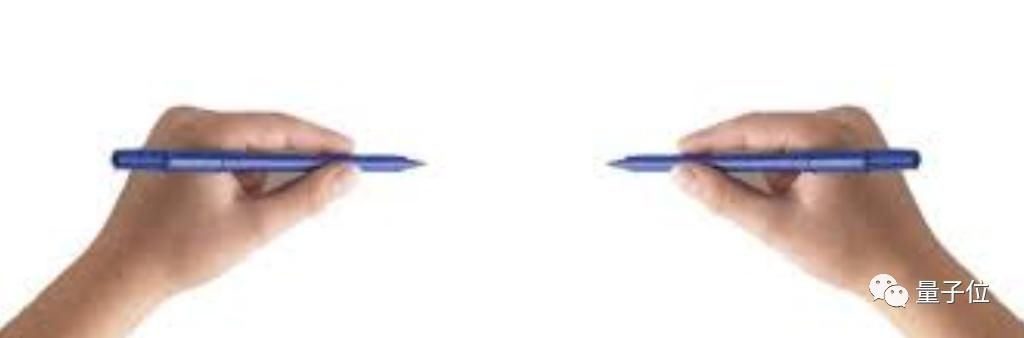
文章插图
那么,激光雷达呢?
这的确是一个好东西,如果多个雷达全方位感知,机器就拥有了 " 神之视角 ",每个角落都能看得清清楚楚。
然而,它造价太昂贵。如果在机器人身上装上可以无死角扫视房间的雷达数量,它就变成了 " 行走的小金库 ",价格让人无法直视。
此外,如红外、超声波等算法,避障精度不如双目准确;至于 3D ToF、结构光等算法,不仅成本高,需要额外配摄像头做目标检测,而且没有区分物体的能力,只能通过大小判断障碍物。(例如,薄薄的袜子可能就被误吸了)
这也是为什么,双目视觉算法在无人车与无人机领域 " 备受欢迎 "。
而现在,双目视觉算法也被用在了扫地机器人上。
3cm 以上:结合 LDS,障碍物全识别
机器的 " 眼睛 ",通俗点来说就是各种大大小小的传感器。(激光雷达、相机后面的传感器)
传感器通常的工作原理,是机器(在角 α 顶点处)发射红外线、超声波、激光,通过 " 眼睛 "(下图角 β 的顶点)接收到后,再根据反射回来的角度、相位或时间,来判断距离(d)。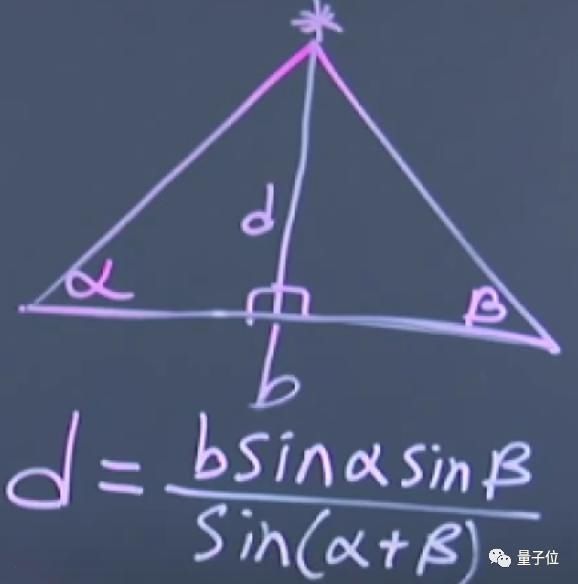
文章插图
△考验高中数学知识的时候到了
而双目视觉的根本原理,就像是将这个三角形变成了 3D 版: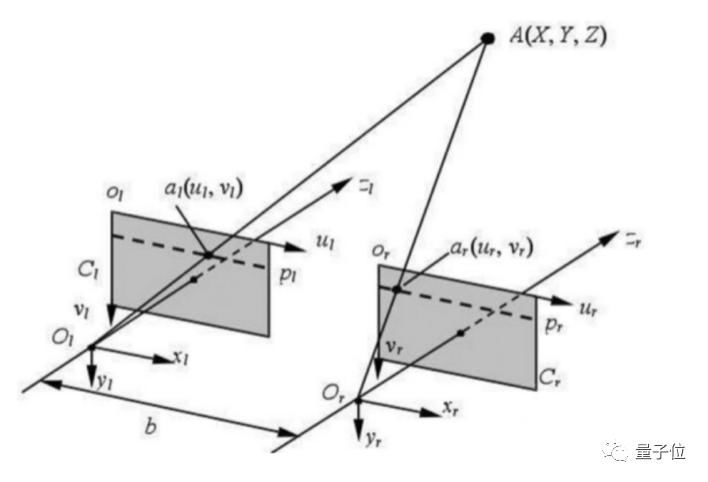
文章插图
它的原理就两步:①确定视差,即将两个相机拍下来的照片进行对比,找出两张照片中相同的点间像素差,②基于视差,通过已知的双目空间几何关系,计算立体空间中各点的距离。
但相比人脑的高精度计算,想要实现计算机的双目识别,并不只有解三角形这么简单。
一个重要的原因,就是在步骤②这一块,计算机本身并不知道摄像机拍的两张照片哪里是一样的。
文章插图
△在计算机眼里,这些小黄鸭就是一堆数据
这就导致双目视觉算法的开发变得非常困难,但带来的收益也很高。
不过,双目视觉算法仍然有缺点,它受光线影响依旧很大。
所以在光线不足时,就用算法去主动 " 补上光线 "。
以石头 T7 Pro 扫地机器人的算法为例,双目视觉模块分为视觉控制和深度估计两部分,一个智能补光,一个估计深度。(甚至专门做个红外拍出的相片,搞成数据集,训练补光识别效果)
但自动驾驶算法,也绝不仅仅只靠 " 两只眼睛 "。
与人类不同,无论是自动驾驶汽车、无人机、还是扫地机器人,都可以说是 " 全身遍布 " 着眼睛。
- 空调|让格力、海尔都担忧,中国取暖“新潮物”强势来袭,空调将成闲置品?
- 同比|亚马逊公布“剁手节”创纪录战绩:第三方卖家全球销售额超48亿美元 同比大增60%
- 闲鱼|电诉宝:“闲鱼”网络欺诈成用户投诉热点 Q3获“不建议下单”评级
- 人民币|天猫国际新增“服务大类”,知舟集团提醒入驻这些类目的要注意
- 产业|前瞻生鲜电商产业全球周报第67期:发力社区团购!京东内部筹划“京东优选”
- 技术|做“视频”绿厂是专业的,这项技术获人民日报评论点赞
- 互联网|苏宁跳出“零售商”重组互联网平台业务 融资60亿只是第一步
- 面临|“熟悉的陌生人”不该被边缘化
- 研发|闽企制伞有“功夫”项目入选国家重点研发计划
- 逛逛|淘宝内容化再升级:“买家秀”变身“逛逛”试图冲破算法局限