按关键词阅读:
不久前,新智驾撰文《夜间场景,自动驾驶值得一说的「好故事」?》,认为夜间场景是高级辅助驾驶(ADAS)和自动驾驶天然存在着的商业需求,只是在实际应用和技术突破中尚存难点。
有意思的是,针对智能驾驶汽车在夜间低光或恶劣天气的棘手技术问题,有玩家号称可以一举攻破,并已装车量产。
近日,昆山星际舟智能科技有限公司(以下简称“星际舟”)对新智驾展示了,基于其自主研发的近红外光“门控”ISP 成像和识别技术,星际舟已生产出适用于白天、雨雪雾(霾)、夜间低光及炫光等场景的全天候ADAS L2+系列产品,同时,在使用最少传感器的前提下,也突破应用到了自动驾驶L3、L4级解决方案的全天候场景。
星际舟成立于2017年,是由海内外专家创办的高科技企业,创始人吴晓闯以及核心团队均来自于世界知名车企以及汽车供应商,在汽车领域有数十年工作经验,对汽车行业的技术开发有深入的研究和了解,在全天候感知识别、智能驾驶决策领域深耕多年。
然而,在车辆中运用新感知技术要想进一步获得行业认可,至少还需要回答以下问题:
1.我们当下熟悉的智能驾驶感知技术成本已被市场接受了吗?
2.智能驾驶行业为什么需要新的感知技术?
3.这种新感知技术有什么独特的竞争优势?目前处于什么进度?
4.从技术到产品再到量产,这对智能驾驶行业又意味着什么?
智能驾驶汽车感知技术的“老大难”无论有人驾驶还是智能驾驶都要面对各种驾驶环境,人们对智能驾驶的期待之一就是要能在全天候环境下正常行驶、减少事故。但事实上下面的驾驶环境下会给驾驶带来很多问题,事故容易多发:

文章插图
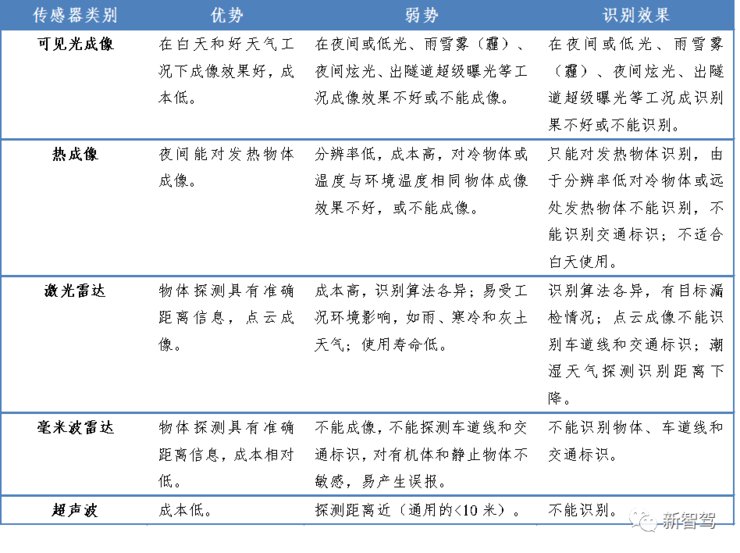
目前,智能驾驶所用的主要传感器包括“可见光摄像头”“毫米波雷达”“激光雷达”和“超声波雷达”,实际应用起来各有优劣:
文章插图
不难发现,目前各类传感器突出的问题是在低光或恶劣天气工况都有明显的缺陷,因此自动驾驶中多种传感器同时使用是当前的一种解决方案,明显的缺点是成本高,潜在的故障点多。
即使使用可见光成像加激光雷达,也不能解决在恶劣天气下的感知和驾驶问题;在ADAS中,为节省成本,基本上采用可见光成像识别加上毫米波雷达,然而这种技术路线不能实现全天候下的高级辅助驾驶。
上述技术缺陷导致了一系列交通事故的发生,如在上列报道中提到的2018年优步的夜间撞行人事件。
又比如特斯拉Model 3的Autopilot自动辅助驾驶系统,它虽配有8个摄像头,前后共有12处超声波传感器,但在该车的产品说明书中,特斯拉还是指出能见度差(大雨、大雪、浓雾等造成)、强光(由于迎面而来的前照灯灯光或直射的阳光等)等因素会限制其辅助驾驶功能的使用。

文章插图
美国AAA公司在2019年对都装有前碰撞刹车系统的雪弗莱Malibu、本田Accord、特斯拉Model 3、丰田Camry四款车进行测试时也发现,这些车辆的行人探测系统在夜间效率低,有明显缺陷,改善夜间效率可极大提升对行人的探测,这也与车辆的用户手册的描述一致。

文章插图
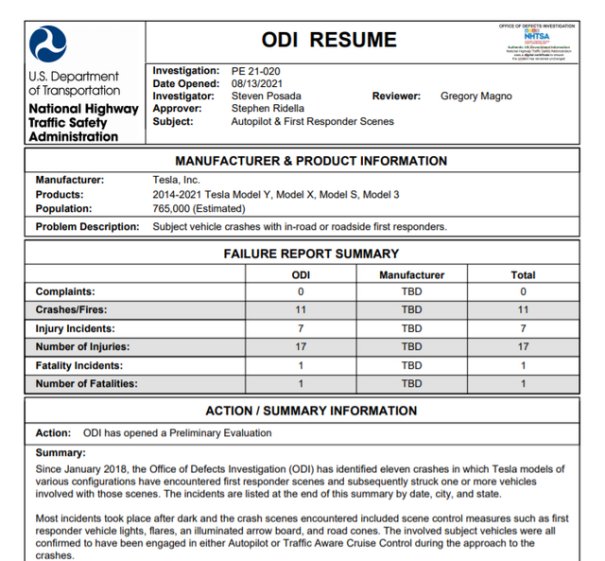
美国国家公路交通安全管理局 (NHTSA)则表示,自2018年以来,特斯拉的Autopilot辅助驾驶系统或交通感知巡航控制系统,已经引发了11起车祸。在这些事故中,特斯拉的汽车撞上了带有闪光灯、发光箭头板或警示灯等的车辆,且大多数事故都发生在天黑后或黎明前。
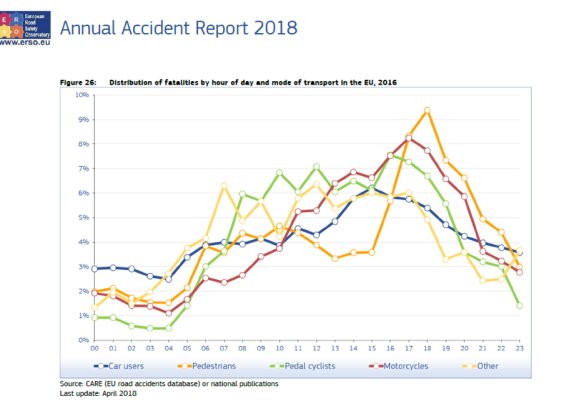
类似地,欧洲2018年的ERSO报告也指出:车辆、行人、自行车等事故率高峰大多发生在低光环境(时段)。
文章插图
文章插图
智能驾驶诞生的初衷是为了提高行车安全性,解放人力,并拓广车辆的驾驶和应用场景,突破人可以操作的工况,但由于现有感知技术局限性,当前的高级辅助驾驶还不足以实现全天候工况下运行;而目前在自动驾驶中,则不得不使用过多的传感器来弥补单一传感器的不足,进而增加成本,增加故障点,而且并不能完全解决全天候工况问题。
因此如何突破技术瓶颈,提升智能车辆在夜间、雨雪雾霾、炫光等场景的安全性,迫在眉睫。![]()
稿源:(雷锋网)
【傻大方】网址:http://www.shadafang.com/c/102c3C352021.html
标题:星际舟|深挖第五种智能驾驶感知技术:解决低光场景感知痛点,实现量产,还低成本?