文章图片
文章图片
文章图片
文章图片
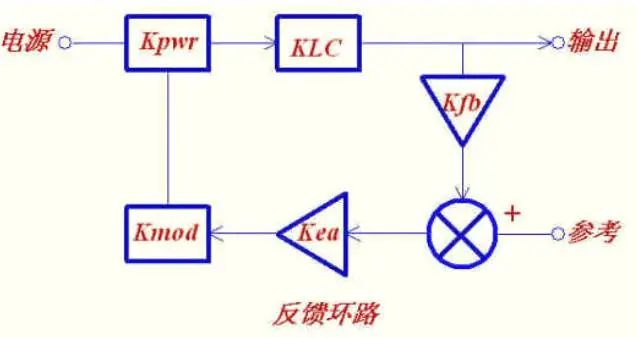
【惠普|控制环路设计的解决思路,5个步骤告诉你!】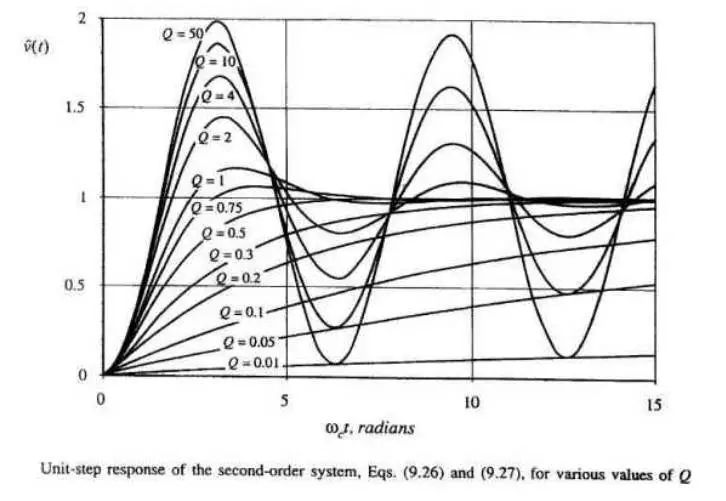
文章图片
文章图片
文章图片
文章图片
文章图片
文章图片
文章图片
引言
作为工程师每天接触的是电源的设计工程师发现不管是电源的老手高手新手几乎对控制环路的设计一筹莫展基本上靠实验.靠实验当然是可以的但出问题时往往无从下手在这里我想以反激电源为例子(在所有拓扑中环路是最难的由于RHZ 的存在)大概说一下怎么计算至少使大家在有问题时能从理论上分析出解决问题的思路 。
01 一些基本知识零极点的概念
示意图:
这里给出了右半平面零点的原理表示 , 这对用PSPICE 做仿真很有用可以直接套用此图 。
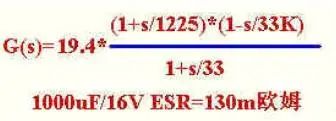
递函数自己写吧正好锻炼一下把输出电压除以输入电压就是传递函数 。
bode 图可以简单的判定电路的稳定性甚至可以确定电路的闭环响应就向我下面的图中表示的.零极点说明了增益和相位的变化 。
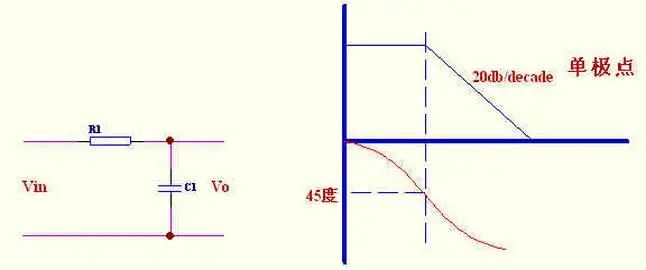
02 单极点补偿
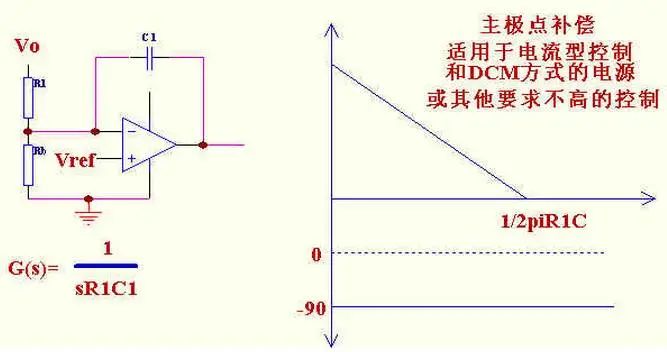
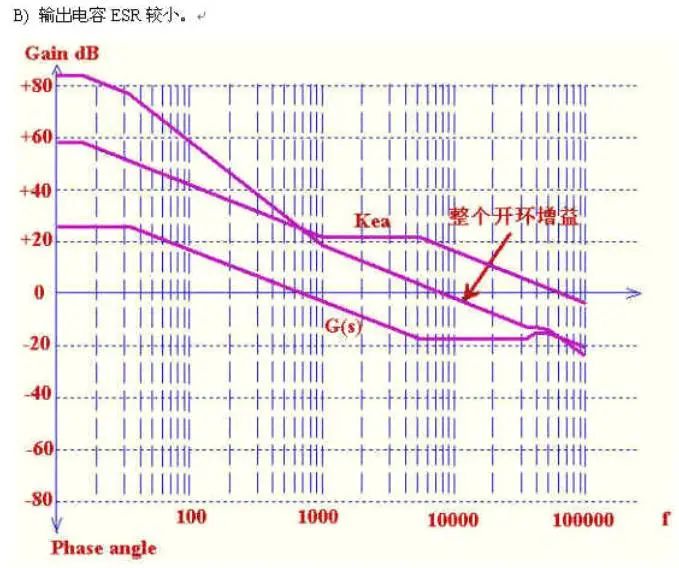
适用于电流型控制和工作在DCM 方式并且滤波电容的ESR 零点频率较低的电源.其主要作用原理是把控制带宽拉低在功率部分或加有其他补偿的部分的相位达到180 度以前使其增益降到0dB. 也叫主极点补偿 。
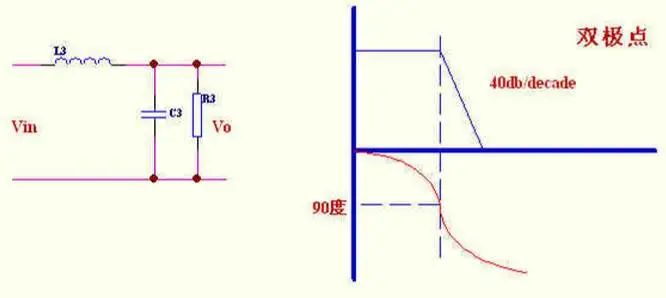
双极点单零点补偿适用于功率部分只有一个极点的补偿.如:所有电流型控制和非连续方式电压型控制 。
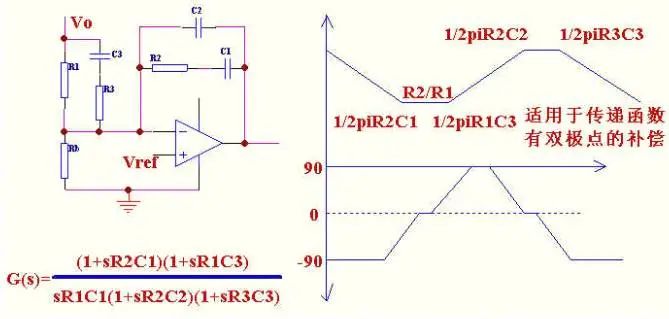
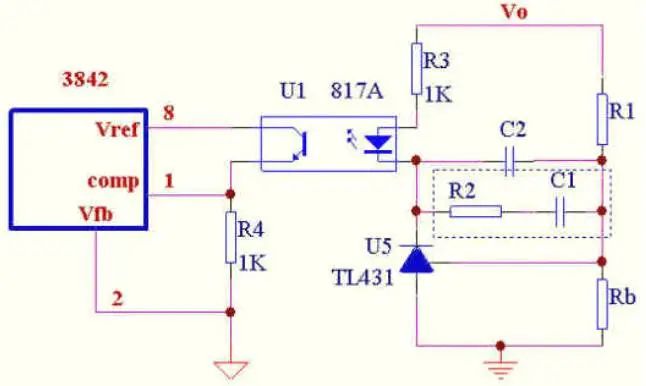
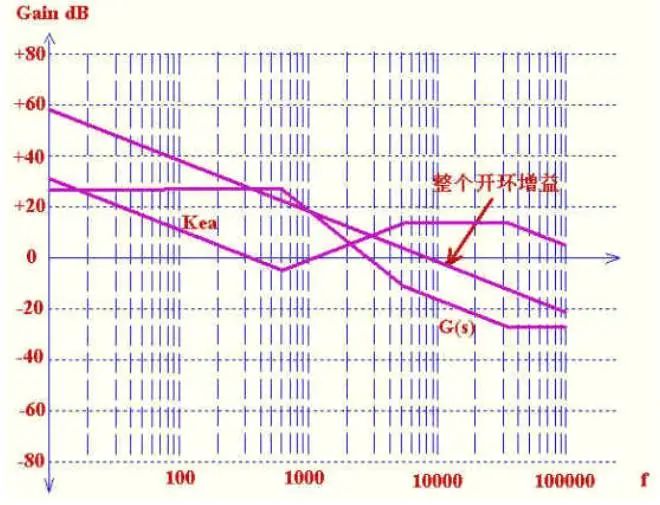
三极点双零点补偿.适用于输出带LC谐振的拓扑如所有没有用电流型控制的电感电流连续方式拓扑 。
C1 的主要作用是和R2 提升相位的.当然提高了低频增益.在保证稳定的情况下是越小越好 。C2 增加了一个高频极点降低开关躁声干扰 。
串联C1 实质是增加一个零点零点的作用是减小峰值时间使系统响应加快并且死循环越接近虚轴这种效果越好.所以理论上讲C1 是越大越好.但要考虑超调量和调节时间因为零点越距离虚轴越近死循环零点修正系数Q 越大而Q 与超调量和调节时间成正比所以又不能大.总之考虑死循环零点要折衷考虑 。
并联C2 实质是增加一个极点极点的作用是增大峰值时间使系统响应变慢.所以理论上讲C2也是越大越好.但要考虑到当零极点彼此接近时系统响应速度相互抵消.从这一点就可以说明我们要及时响应的系统C1 大至少比C2 大 。03 环路稳定的标准
只要在增益为1 时(0dB)整个环路的相移小于360 度环路就是稳定的 。
但如果相移接近360 度会产生两个问题:1)相移可能因为温度负载及分布参数的变化而达到360 度而产生震荡;2)接近360 度电源的阶跃响应(瞬时加减载)表现为强烈震荡使输出达到稳定的时间加长超调量增加.如下图所示具体关系 。
所以环路要留一定的相位裕量如图Q=1时输出是表现最好的所以相位裕量的最佳值为52度左右工程上一般取45度以上.如下图所示:
- arduino|使用继电器和MOSFET–ARDUINO接口的直流电机控制器
- 一加ace|搭载酷睿P的惠普战66开启预售,轻薄本处理器应该怎么选?
- 酷睿处理器|惠普轻薄本战66 酷睿版开售5299起,最高12代i7,新增MX570独显
- 惠普|最低只卖3999元起 惠普星15青春版2022是否值得选?
- 5G|惠普重磅推出5G全互联轻薄本 成为细分领域“破局者”
- 惠普|清华毕业生最爱去哪儿?腾讯、阿里分列2、3位,榜首确实不简单
- iPhone|PS5 控制器在 PC 上变得更加可用
- 酷睿处理器|军标品质美观耐用 惠普战66五代酷睿版图赏
- 中兴|OPPO K10首发搭载天玑8000 Max:性能强劲,功耗控制优秀!
- 惠普|“赚钱”能力超越巴菲特,这个UP居然跑路了!