IT之家 1 月 23 日消息,据中科院消息,近日,中国科学院沈阳自动化研究所在空间机器人自主操控方面取得进展,针对航天器平台和机械臂的动力学耦合提出基于时延估计的无模型解耦控制算法。
据介绍,由于外太空高低温、超真空、强辐射等恶劣环境,由航天器和机械臂组成的空间机器人系统具备航天器的机动能力和机械臂的操作能力,未来将广泛应用于在轨服务和深空探测领域。
空间机器人可承载大量的自主操作任务,如抓捕、装配、搬运以及采样返回等。对于此类机器人,航天器平台和机械臂之间存在复杂的动力学耦合作用,影响机械臂末端的操作精度。因此,如何有效抑制或补偿基 — 臂耦合作用是空间机器人领域的热点和难点问题。
为此,沈阳自动化所空间自动化技术研究室科研人员基于时延估计(Time-delay estimation, TDE)算法和超扭转控制(Super-twisting control, STC),提出一种无模型鲁棒解耦控制算法。IT之家了解到,该方法本质为瞬态学习控制算法,通过引入常数对角阵对动力学模型进行改造,将新模型划分为线性项和新非线性项,利用模型前一时刻的观测信息和控制输入来估计当前时刻系统的新非线性项,实现系统高效解耦。
【 中科院|中科院在空间机器人自主操控研究中取得进展,提升机械臂操作精度】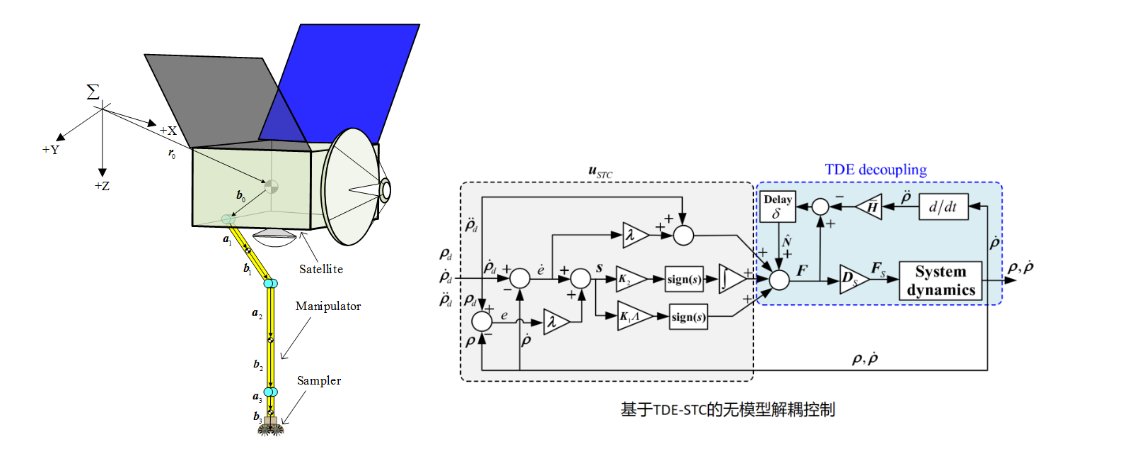
文章插图
该方法优点在于不需要实时计算系统模型参数,算法具有内在自适应性,计算效率高。该成果将为后续开展空间机器人在轨服务和深空探测任务提供理论基础和技术支撑。
- 熟人|年轻人都在玩的“啫喱”,没撑过3天?
- 余承东|采用燃油优先模式,单程1400公里,余承东又在吹牛了吗?
- 三星手机|三星手机的销量可以做到全球第一,为何在我们国内却进不了前五名?
- 5G|现在换手机,是选4G还是选5G的?过来人的建议让你不纠结!
- 充电器|在国外很受欢迎,常年居美国销量第1,这个国货国人却鲜为人知
- 软件|高薪达人都在用的10款APP
- 程序员|在中国,有多少程序员干到46了?那么其他人去干什么了?
- 国产手机|国产手机品牌当中,谁家没有在玩“机海战术”!
- 飞利浦|如何在 MacOS 和 Windows 上捕捉窗口
- excel|2022年必须掌握,且随时要用到的Excel高效录入技巧,全在此文