生而知之是指部分认知能力与生俱来,新生儿的脑神经有很多先天的连接。它给我们的启示是:现在的大多深度学习算法,大部分都是从零开始训练,而没有充分或者高效利用先验知识或者已有模型。如何利用“现有知识”是深度学习的下一个热门方向。学而知之是指大部分认知能力是后天学习到的,尤其是早期学习。通过学习脑神经建立了更多的连接。孩子很多能力,包括感知、应对、语言、读写和理解,甚至分析问题和解决问题的思路和能力在很小时候已经基本定型;以后基本都是知识的积累。这意味着脑神经元很早的时候就连接定型成一个元模型,剩下的是只是利用这个元模型去解决具体领域的问题。这个与当前的大规模预训练模型有着惊人的相似之处。学而知之的另一层次是:人类学习过程依靠多源的、多传感的、多模态的、多角度的数据,例如视觉、听觉、嗅觉、触觉和语境等联合信息,而今天的深度学习依靠大都是一段语音、一张照片,因此,未来AI模型的输入数据可能不仅是单一的数据,而是多个信号源的融合。如何模仿人类学习的过程,这是认知科学对深度学习的另一个启示。再者,人类学习过程是一个从样本示例到原理归纳的过程,而不是仅停留在样本示例层面;目前深度学习却都是停留在样本层面。那么,未来是否能够构造类人的机器学习框架,无论输入什么样的数据,只要逻辑相通,都会收敛到一致的模型?突破深度学习的数据瓶颈,可以尝试构建规则的众包系统,让人类教机器学习过程,其目的不是输入数据,而是让机器学习规则。由于我们试图从日常的活动中学习规则,这种规则普通人都可以标注示教,这就打破了以前专家系统地需要“专家”的局限。这种从“大数据”过渡到“大规则”模型构建方式显然也更符合人类的认知。
文章插图
众所周知,在机器人领域,波士顿动力公司的产品最“像人”,如上动图,机器人跳舞丝毫看不出生硬的感觉。但受计算资源、能量、运动控制的限制,它只能运行几十分钟。其实,波士顿动力机器人的运行方式是基于电机驱动,存在很多缺点,例如刚性运动、自重比较大、反应速度和灵活性的矛盾以及耗能大。
对比人类和其他动物的运行方式,肌肉、骨骼、传感和神经的结合可以在低能耗情况下,实现灵活运行。这给研究者的启示是,机器人的运行系统应该像人一样满足:高效、灵活、精确、鲁棒、刚柔并济、轻量、自适应等指标。当前的运动智能可能在某一个维度表现优秀,但综合考量仍然有很多缺点。【 大数据|IEEE Fellow李世鹏 :人工智能与机器人前沿研究之思考】
文章插图
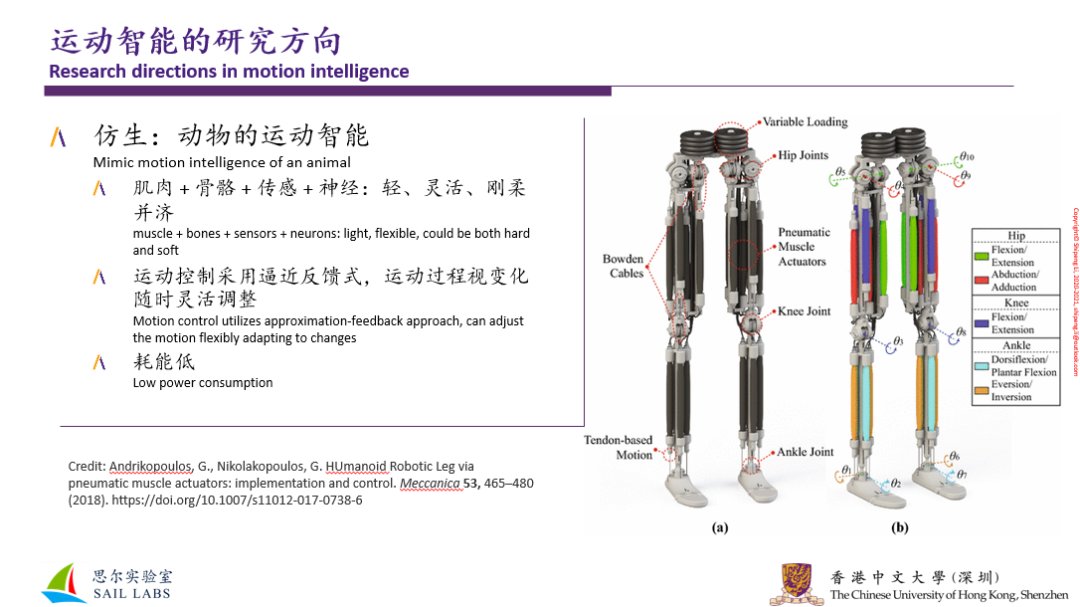
因此,运动智能的一个重要研究方向是:仿生。仿照动物的运动智能,例如运动控制采用逼近反馈式,运动过程视变化随时灵活调整。
文章插图
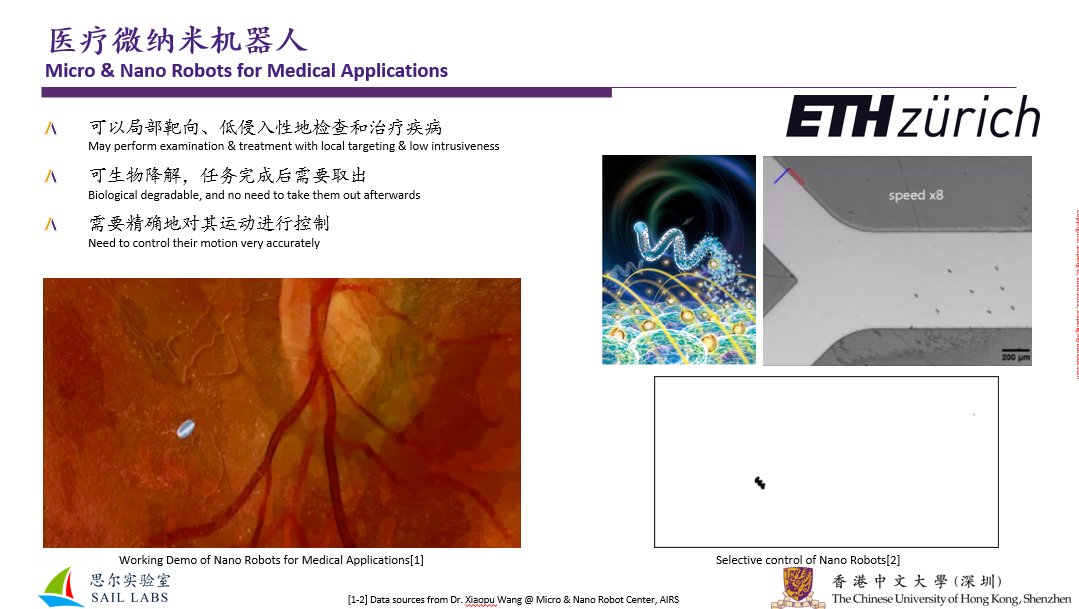
如果说机器人是靠“内力”驱动,而医疗微纳米机器人是“外力”研究方向的代表。例如依靠磁力,小机器人精确地将药物从一个管道运送到另一个管道。在人机谐作层面,区别于协作,“谐作”代表人机协作中的耦合、交互、增强、互补、协作、和谐等意思。人机谐作的目标是:不需要告诉机器人类的意图,机器就能领会,从而达到人机的无缝连接。在达成人机谐作的过程中,重点研究人机自然交互、感知及增强。具体可能包括:生物特征检测和识别、人机接口、脑机接口、语音识别、动作识别、表情识别、语言理解、意图理解、体态感知、无隙增强,以及在扩展现实与远程现实的延伸等等。人机增强智能方面,今天的机器学习框架大都是基于大数据的深度学习框架,肯定会遇到机器智能处理不了的情景。这对于某些高风险领域,例如自动驾驶、金融等来说是致命的。