智能车电感差比和差加权算法研究( 四 )
其次 , 尝试对水平电感差比和偏置算法进行了建模 , 公式如下
 文章插图
文章插图
将中间两纵向电感的差值乘以1/3000才得到一条不错的曲线 。
 文章插图
文章插图
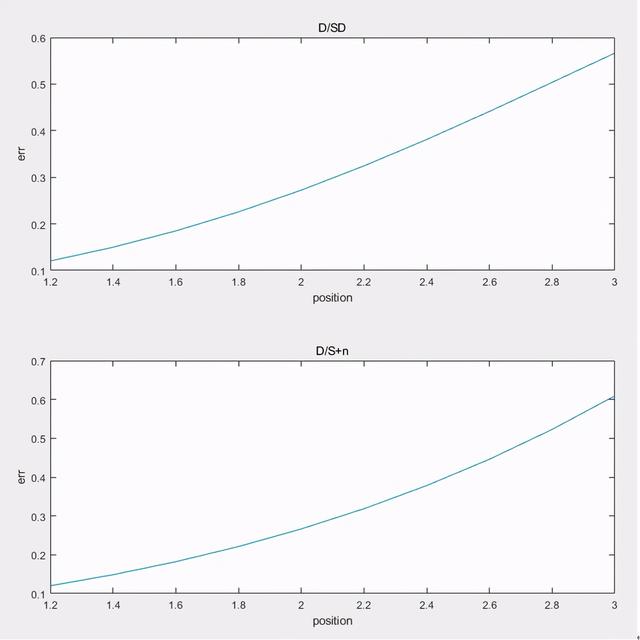
▲ 图C2.4 曲线对比
图C2.4中 , 差比和偏置算法的内环区数据斜率要小于差比和差加权算法 , 而曲率又更大 , 小车更难切内环行驶 。 如果想让小车切内环行驶 , 就需要增加中间两纵电感的权值 , 但是如果算法的曲线出现了差比和加权算法的内环区反增的趋势 , 则会产生过调抖动 , 容易冲出赛道;若是出现了曲率过大的情况 , 那么小车就更难切内环行驶 。
差比和所输出误差值曲线更加贴合一次曲线 , 能够支持小车入弯切内环行驶 , 而其他很多算法无法做到这一点 , 这也是差比和差算法出色的优势之一 。
2.5 小结本章从不同角度入手 , 用各种方式证明了电感差比和差算法对弯道道型有着良好的亲和度 , 同时也具有很高的稳定性;证明了电感差比和差加权算法相较于电感差比和加权算法 , 水平电感差比和偏置算法的优势 。
除此之外 , 电感差比和差算法由于分母的减小 , 其输出误差所需的比例系数也有所下降 , 小车在长直道型上行驶时的抖动也会有所下降 。 需要注意的是电感差比和差相较于电感差比和加权算法 , 赛道适应性有所下降 , 需要对各项参数投入更多关注 。
直接调节电感差比和差加权算法 , 可能会因无法直观的了解各参数而走弯路 , 故建议先调出一套相对稳定的电感差比和加权方案 , 然后将其改写为电感差比和差加权算法 。 这样做的理论依据有二 , 其一 , 长直道上 , 纵向电感值接近于零 , 两算法差距不会太大 。 第二 , 由第二章所建立的模型中可以看出 , 小车沿中线行驶时 , 两加权算法的输出误差曲线相似 , 差比和差加权算法的参数可由差比和加权算法参数微调获得 。
3.2修复过调以电感差比和加权算法调试出一套慢速稳定的方案后 , 将算式改写为差比和差加权算法 , 此时由于分子的下降 , 小车在弯道道型出现小幅度过调 。 此时轻微降低比例系数(约为差比和加权算法的0.7到0.8倍)即可完全拟合 。
 文章插图
文章插图
[1]殷剑宏 , 吴开亚.图论及其算法[M].中国科学技术大学出版社,2003.
[2]卓晴,黄开胜,邵贝贝.学做智能车:挑战"飞思卡尔"杯[M].北京:北京航空航天大学出版社,2007.
[3]王盼宝主编.智能车制作[M].北京:清华大学出版社,2017.
[4]谭浩强著.C程序设计[M].北京:清华大学出版社,2003.
[5]张文春.汽车理论[M].北京:机械工业出版社.2005.
- 联想正开发下一代ThinkReality智能眼镜
- 199元 小米有品众筹智能健腹轮:LED数显 轻松练出马甲线
- 智能手机时代,电池越来越不经用,怎么充电才能延长电视寿命?
- 人工智能|麻辣财经:我国“算力”增长迅速,有力支撑人工智能发展
- 人工智能有助于文学照亮人性
- 2021海口国际新能源汽车暨智能网联汽车展览会开幕
- 有没有必要给老年人买台智能手机?
- 人瑞人才(06919):未来3年系统平台将发力智能化,打造职业生态链平台
- 疫情背景下 智能录音笔成远程工作利器
- 识别|不摘口罩也能识别人脸?伊朗推出新型智能摄像头加强治安