马斯克再怼何小鹏:抄袭旧版技术还挺美!激光雷达让特斯拉眼红?( 二 )
其中 , 在软件架构方面 , 小鹏汽车以全栈自研为基础 , 拥有感知、行为规划以及行为/运动预测、地图融合等多个模块 , 可形成数据和算法的全闭环 , 支持快速功能迭代 。
在硬件架构方面 , 未来 , 小鹏汽车将采用包括高清摄像头、毫米波雷达、超声波传感器、激光雷达、高精度定位、高精地图、高性能计算平台的方案 , 总计32个自动驾驶传感器 。
 文章插图
文章插图
在自动驾驶领域 , 业界一般分为视觉派和激光雷达派 , 然而现在业内公认的未来完全自动驾驶方案是使用激光雷达 , 但特斯拉方面却因为成本问题选择放弃 。 马斯克本人也曾多次抨击激光雷达 , 理由是其成本高昂 , 不利于智能电动车的普及以及商业化 。 甚至公开表示永远不会使用激光雷达 。
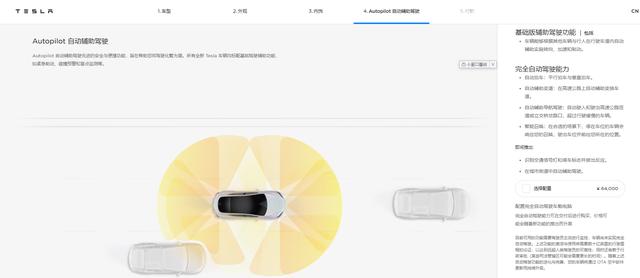
以目前在售的特斯拉Model 3为例 , 全车配备8个摄像头、12个超声波传感器与1个增强版毫米波雷达 , 8颗摄像头 , 能为Model3提供360度视野 , 探测半径达到250米 。 同时 , 新车也标配基础版的Autopilot自动辅助驾驶功能 , 如紧急制动、碰撞预警和盲点监测等 。
 文章插图
文章插图
但实际上 , 摄像头有天生的缺陷 , 特别是在强光线下 , 或者以白色为基调的物体时 , 特斯拉这套方案的缺陷比较明显 。 即使特斯拉还配备了毫米波雷达 , 但受限于感知距离较短 , 如果车速过快 , 系统也无法迅速响应 。
与毫米波雷达和摄像头相比 , 激光雷达具备高分辨率、远距离和视角广阔等特性 , 但还有一个非常明显的优势是——长距离激光雷达传感器能有效识别路面上的石头等远处的非金属物体 。
举个例子 , 一辆高速行驶的摩托车在交叉路口接近自动驾驶车辆 。 在这种情况下 , 传统雷达可能很难检测出摩托车较窄的轮廓及其塑料材质的整流罩 , 而在强光照射下 , 摄像头也很难清晰地捕捉画面 。 但这种情况下激光雷达就可以完全胜任 。
 文章插图
文章插图
2016年 , 世界公认的首起特斯拉“自动驾驶”致死事故 , 美国一台Model S钻入正在转弯的白色重卡车底 , 以及不久前台湾一台Model 3在高速上径直撞上已经侧翻的白色大货车箱体 , 都是因为强光下的大面积白色车身而影响了系统判断 , 这种情况下无论对摄像头或者毫米波雷达都可能出现误判 。
- 马斯克不满WhatsApp新政策 Signal或成最大赢家
- 脑机接口发展失控,人类或将成为变形金刚,马斯克也很无奈
- 高下立判!马云吐槽马斯克的梦想,任正非却表示要包容
- 马斯克:现在私有化特斯拉是不可能的
- 马斯克永生在即,马师傅却马失前蹄,互联网巨兽被3招制服
- 苹果|马斯克自爆曾想把特斯拉卖给苹果:但库克见都不见我
- 库克再放大招!明年春季推新款iPhoneSE:欲截胡国产旗舰
- 精辟!马斯克建议CEO们少花点时间在PPT上:“将军不会待在象牙塔里”
- 苹果与特斯拉,必有一战
- 马斯克:苹果曾有低价收购特斯拉的可能 可惜库克拒绝会面丨热公司