DELMIA虚拟仿真:机器人程序自动生成功能介绍与使用方法
概述大多数的虚拟仿真与离线编程软件都有机器人运行程序自动生成的功能 , 利用程序自动生成功能可以快速、准确、高效地创建机器人运行程序 , 提高示教编程效率、降低停机时间 。 尤其是对于一些复杂的加工路径轨迹(如空间曲面轨迹、不规则形状边缘轨迹) , 若是人工在线示教编程 , 那将是一件非常艰难的任务 , 甚至根本无法完成 。 利用仿真软件的程序自动生成功能 , 这些任务将变得非常简单 , 它通过在工件模型上选取待加工的几何特征曲线 , 并对曲线进行适当的限制 , 然后软件再将这些几何特征曲线自动转换为机器人运行路径轨迹程序 。
DELMIA软件也同样提供了机器人运行程序自动生成的功能 , 这个功能叫“Create FollowPathActivity” , 它可以通过选取模型几何特征的边缘自动生成机器人运行路径轨迹程序 。 由于只能选取模型几何特征的边缘曲线 , 因此它特别适合去毛刺、涂胶、滚边、切割、铣削等工件边缘路径连续加工的机器人工艺应用场合 。
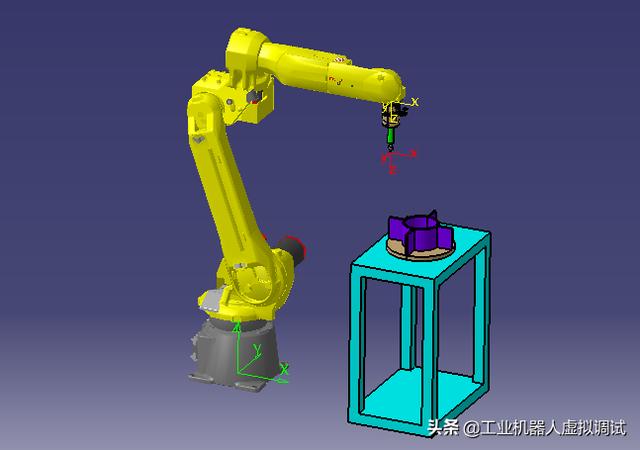
仿真环境搭建以机器人去毛刺加工为例 , 创建虚拟仿真工作站 。
DELMIA软件的“Device Building”模块中 , 将导入的气动主轴模型定义为机器人去毛刺工具 , 即在气动主轴上分别添加Base坐标系与TCP坐标系 。
在软件的“Device Task Definition”模块中搭建去毛刺机器人虚拟工作站 , 机器人模型使用软件内置机器人模型库中的FANUC机器人 。
使用CATIA软件分别对简易工作台与加工工件进行建模 , 并将创建好的模型导入DELMIA软件 。
导入去毛刺工具模型 , 将其安装到机器人上 。 最后 , 对机器人工作站进行布局 , 效果如下图所示 。
 文章插图
文章插图
功能使用注意事项【DELMIA虚拟仿真:机器人程序自动生成功能介绍与使用方法】要想使用“Create FollowPathActivity”功能进行模型曲线特征选取 , 那么模型数据格式一定不能是简化后的可视化数据格式(如CGR格式) , 而是以机械设计软件保存的原始模型数据格式最佳 , 如CATIA软件保存的CATPart格式 。
导入的模型只有处于“设计模式”时 , 其边缘特征才能被识别选取 。 “设计模式”设置方法:左侧PPR浏览树中双击模型 , 然后再鼠标右击模型 , 在弹出的快捷菜单中依次选择“展示”→“设计模式” 。
最后再双击PPR浏览树中ProcessList下的“Process” , 返回“Device Task Definition”模块 。
 文章插图
文章插图
功能使用方法在Sequence工具条中使用“New Task”命令为机器人创建一个新任务 , 任务名称默认为“RobotTask.1” 。
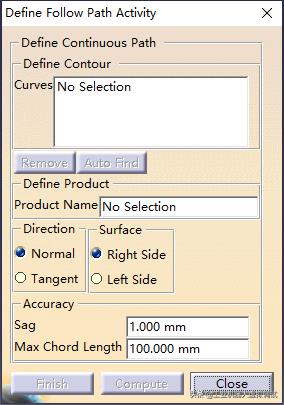
点击“Create FollowPathActivity”命令按钮 , 然后在PPR浏览树中点击创建的机器人任务“RobotTask.1” , 弹出Define Follow Path Activity对话框 。
 文章插图
文章插图
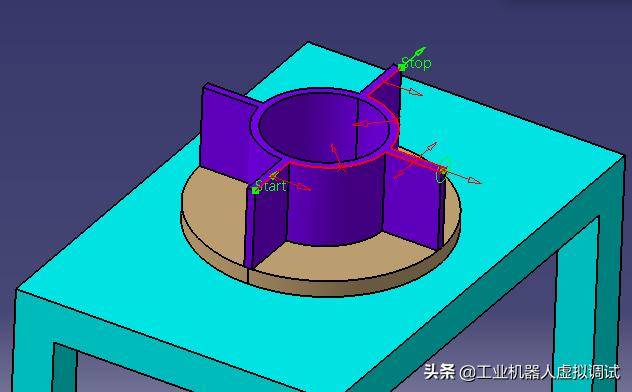
在工件模型上依次选择要生成的加工路径曲线 , 选取完成后工件模型上出现红色与绿色的标记线 。
绿色箭头:表示选择的加工路径曲线的起始点(Start)与结束点(Stop) , 箭头指向代表机器人加工运行方向 。 通过鼠标拖动箭头 , 可以修改起始点与结束点的位置 。
红色箭头:表示机器人的接近方向 , 鼠标点击红色箭头可以对其指向进行翻转 。
带箭头的绿色圆圈:鼠标点击绿色圆圈或圆圈内的箭头可以翻转起始点(Start)与结束点(Stop) 。
 文章插图
文章插图
同时 , 在Define Follow Path Activity对话框的Curves列表框中显示选取的路径曲线 , 相应的路径程序生成参数也被激活 。
- 企业建站使用服务器好还是虚拟主机好?
- 《深入理解Java虚拟机》:锁优化
- AR应用可让虚拟人物在用户家中表演一首欢快版贝多芬经典作品
- 聚焦虚拟电厂
- GitOps—通过CI/CD自动化构建虚拟机模版
- 「翻译」虚拟内存介绍
- Gucci要卖“虚拟服装”,你会为自己的虚拟形象买单吗?
- 新手使用vm安装Linux系统centos7虚拟机详细教程
- “仿真机器人”内部结构逼真,功能性强大,网友却表示:不敢用
- 康奈尔可拉伸传感器可重新定义软机器人和虚拟现实技术