工业机器人|看图轻松掌握工业机器人关键知识点!
文章图片

文章图片

文章图片
文章图片
文章图片

文章图片
【工业机器人|看图轻松掌握工业机器人关键知识点!】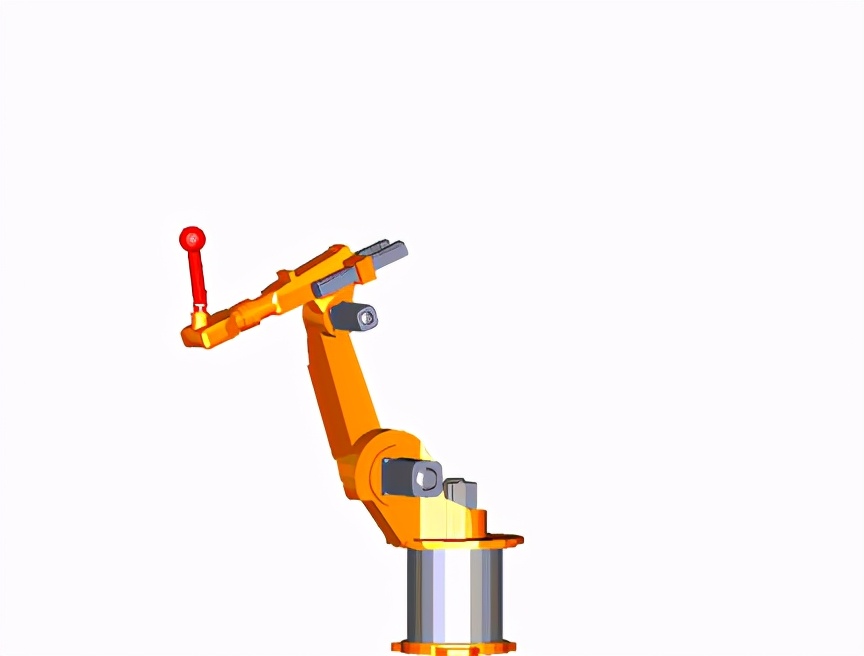
文章图片

文章图片
文章图片
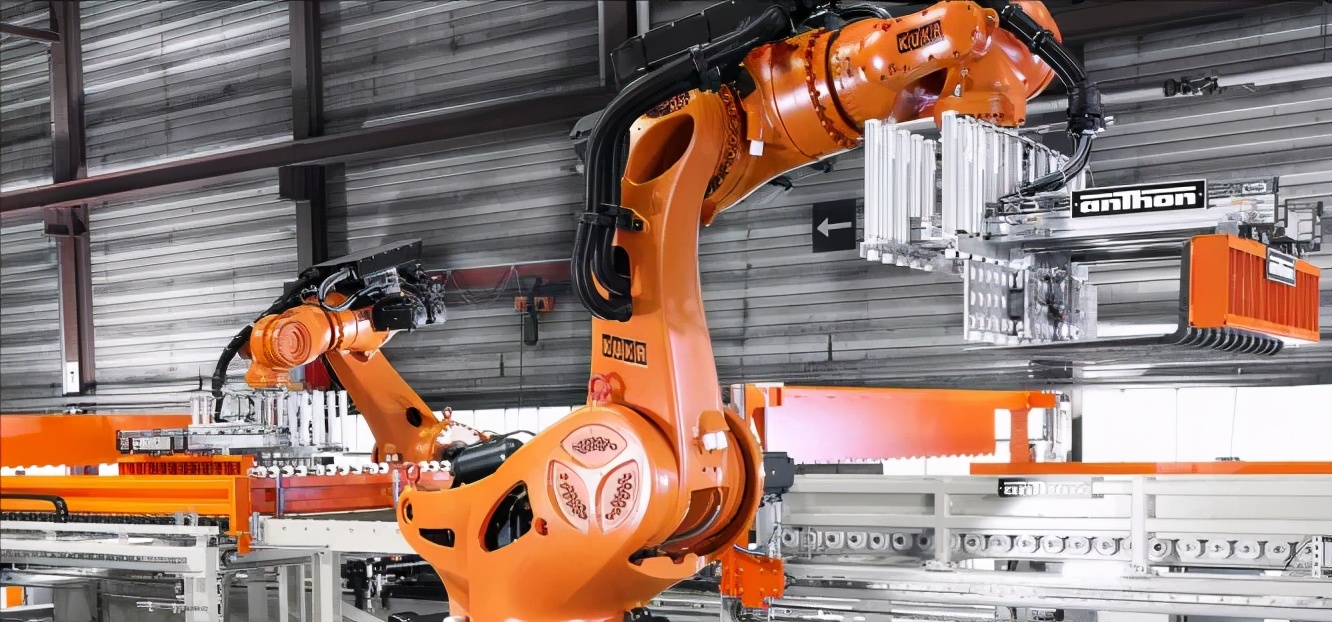
工业机器人是先进制造业升级中的重要装备 , 也是衡量一个国家制造业科技水平的重要标志 。 以工业机器人为主体的机器人产业 , 是破解我国产业成本上升、环境制约问题的重要途径 。
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置 , 它能自动执行工作 , 是依靠自身动力和控制能力来实现各种功能的一种机器 。 它可以接受人类指挥 , 也可以按照预先编排的程序运行 , 现代工业机器人还可以根据人工智能技术制定的原则纲领执行任务 。
最早符合ISO标准的工业机器人是由比尔?格里菲斯?泰勒在1937年制作完成 , 并于1938年3月发表在Meccano杂志上 。 这种类似起重机的工业机器人全部使用Meccano零件制造 , 并由单个电动机提供动力 , 这款工业机器人可以按照预编程的方式堆叠木块 。
20世纪中期是工业机器人研发的关键时期 , 特别是在工业环境中 , 重复运动和举升重物的工作使机器对人类帮助很大 。 大多数工业机器人用于对人类来说太脏太累或太危险的工作环境 。
乔治·戴沃尔最早提出了工业机器人的概念 , 并在1954年申请了专利(专利批准在1961年) 。 在1956年 , 戴沃尔和约瑟夫·恩盖尔柏格基于戴沃尔原先的专利 , 合作建立了Unimation公司 。 1959年Unimation公司的第一台工业机器人在美国诞生 , 开创了机器人发展的新纪元 。
▲乔治·戴沃尔
机器人技术是一个多学科领域 , 融合了机械、电子、计算机科学、控制、人工智能、物理学和数学领域 。 工业机器人是由六个基本组件组成:动态单元、手臂末端机器、数字计算机控制器、执行器、输入设备和检测器 。
工业机器人执行器:执行器控制每个轴并保持运动方向 。 由于机器人需要处理各种组件的重量 , 因此它的运动变化很大 。 从机器人计算机发送有关运动方向的命令 , 并不断检查反馈 , 以确保运动部件遵循正确的路线 。 此过程需要高速设备发送命令 , 并以合理的速度读取系统的运动 。
数字计算机控制器:对于机器人来说 , 它控制着每个组件的正常运行 。 计算机控制器可以输入和存储各种程序 , 从而确定工作顺序的连接和关系 。
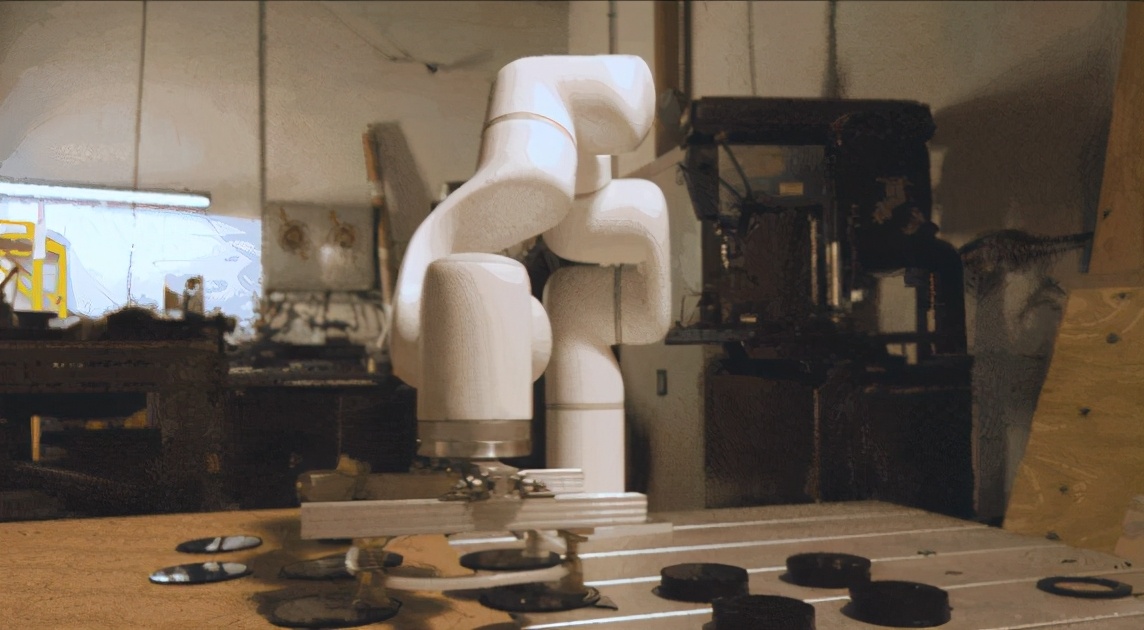
▲从杂物堆中分类取物的实验室机器人
传感器:机器人使用传感器来识别和评估位置变化 , 样式差异以及外部系统的阻碍或故障 。
反馈系统:工业机器人的反馈设备可以测量每个轴的位置 , 移动速度和加速度 。 轴必须将任何点设置为零作为参考点 , 以便可以实现相对线性的运动 。
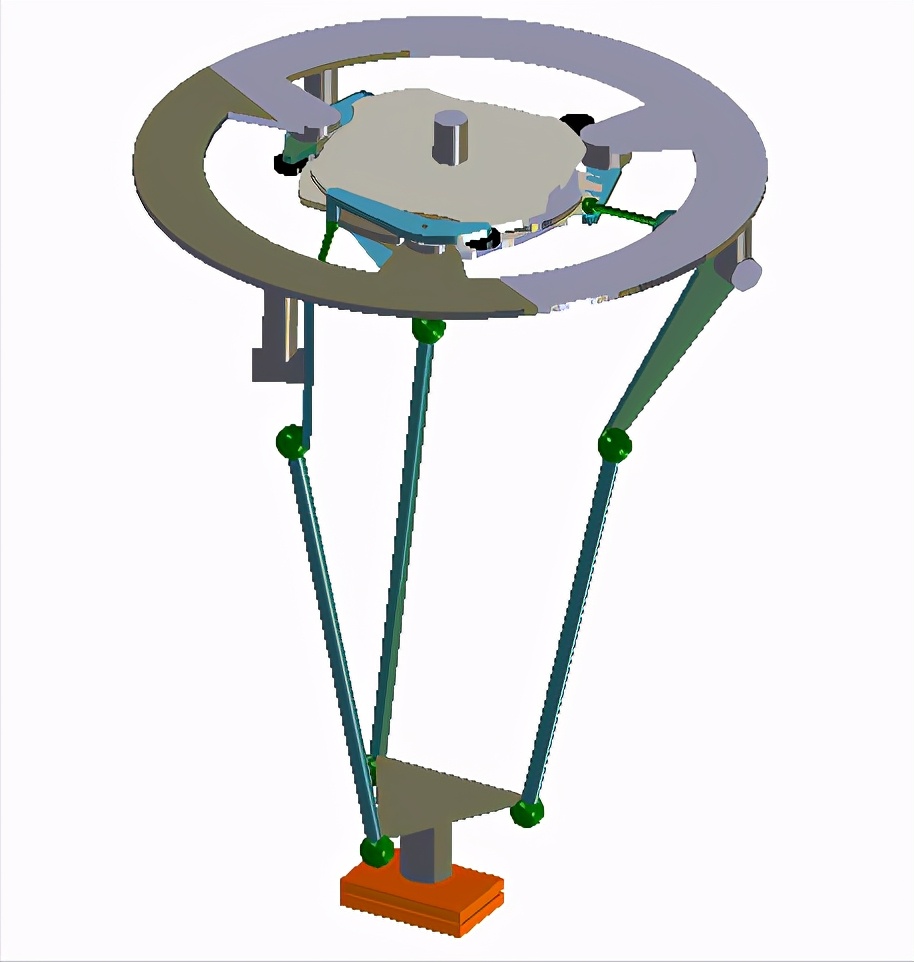
动态系统:包括工业机器人手臂在内的机器人系统的运动部分 。 动态系统的结构是通过连接许多旋转或线性运动关节来实现的 。
工业机器人关节提供的运动可以将机器人结构或机器人手臂放置在特定位置 。 下面列出了不同类型的关节配置 。
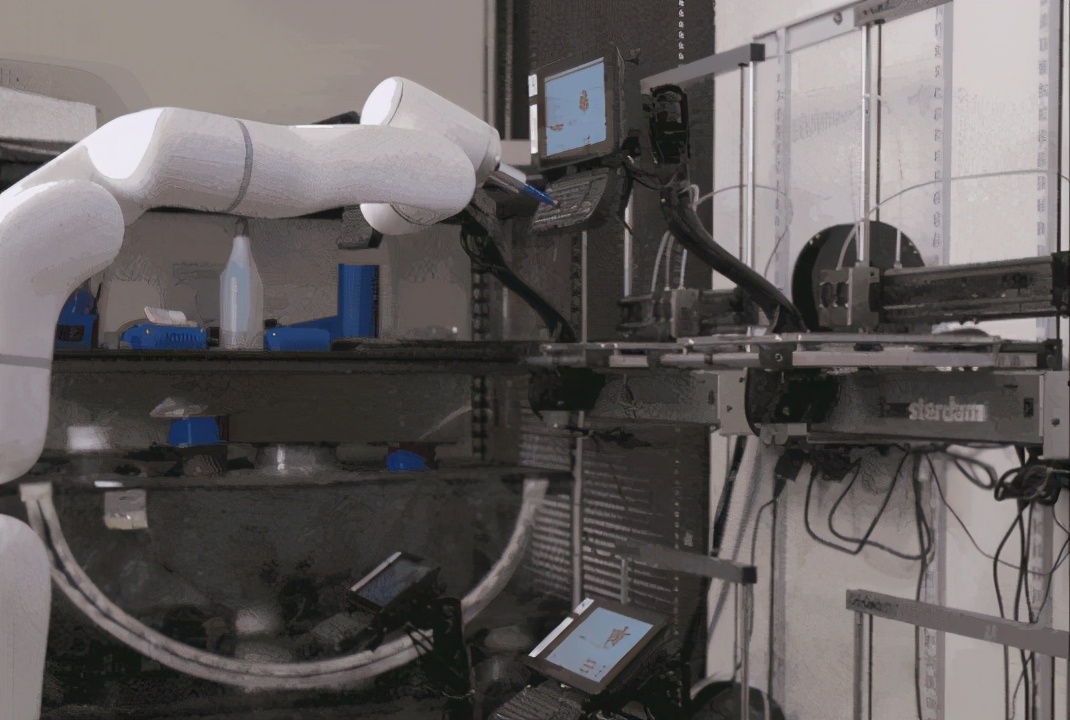
▲ABB工业机器人完成了“芬达罐”挑战
铰接式配置:关节臂是最常见的机器人手臂 , 与人的手臂非常相似 。 通常是六轴机器 , 它们提供了冗余 , 移动运行更加顺畅 。
- 机器|也许未来,人类进化的方向是成为机器人,人族进化成机器族
- 机器人|得物App公布“潮流主场计划”:3.2亿现金,200亿流量扶持潮流内容创作者
- 机器人|?我国拿下全球首例!售价2000万机器立大功,前沿技术冲至领先
- 超星系团|3亿公里外,仅能工作17小时的德国机器人,传回令人欣喜的照片
- 索尼|瞄准工业半导体领域,看索尼集团如何从未让人失望
- 工业互联网|不仅抢骁龙8Gen1首发,还要抢两亿像素首发,摩托罗拉开始发力了
- 云计算|TANGSTUDIO音乐沙龙3|互联网与工业标准作品呈现
- 卫星|第五次工业革命:未来太空新图景,有可能成为第一代太空移民
- 郑州|黑科技!郑州各汽车站上线智能测温机器人
- 机器人|网购BOUX手表货不对板, 买卖双方均称遭威胁?