首页 >
人文 >
按关键词阅读:
2016年五月,一辆特斯拉ModelS在开启自动驾驶模式,保持110公里每小时的速度撞上了一辆左转的卡车,驾驶员当场死亡。在特斯拉的官方声明中,事故原因被归结为摄像头没有成功区分卡车的白色侧面和明亮天空。出现这种情况当然是意外,但现实世界就是充满了意外。暴雪眩光突然出现的袋鼠和老年代步车都让你和车措手不及。

文章图片
今天主流的IDS汽车有三类成像设备,摄像头,毫米波雷达和超声波雷达,摄像头主要用来辨认尾灯,红绿灯,车道线和行人动物的运动物体,但光线一差就容易出问题。2018年3月5日的一辆自动驾驶Uber撞死了一位横穿马路的女士,主要原因就是它横穿道路的路线,恰好在阴影区域,摄像头什么都看不到。

文章图片
毫米波雷达可以弥补摄像头的缺陷,补充距离和速度信息。通过八十毫米波并接收反射波计算与障碍物的距离。同时,根据多普勒效应测量反射波的频率在与发射波的频率比较就可以计算出相对速度,而超声波雷达则可以探测近距离障碍物完成自动泊车等功能

文章图片
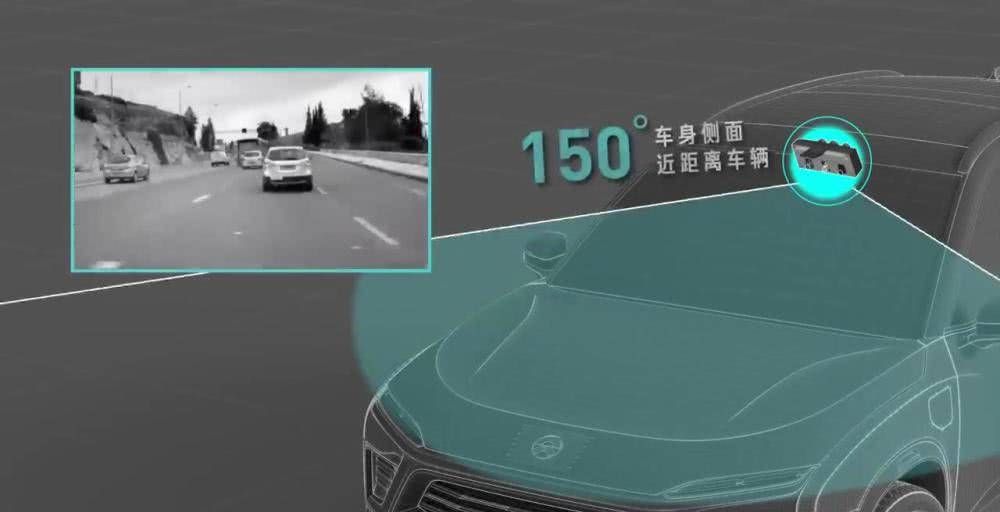
保险杠侧视镜挡风玻璃上一共装了八个摄像头,五个毫米波雷达,12个超声波雷达,其中三目摄像头提供了更丰富的视野。二十八度摄像头负责远距离目标和红绿灯52度摄像头,负责路况检测150度摄像头负责探测车身侧面和短距离插队的车辆共25个传感器,配合模板,自动驾驶芯片,可以帮助汽车在五十毫秒内完成车道线障碍物识别。

文章图片
探测物体距离和速度辅助汽车驾驶达到两百毫秒的反应时间。比如最基本的ACC自适应巡航和OK车道保持,顾名思义,ACC就是让车按照设定速度行驶,但使用毫米波雷达的传统为有很多局限性,比如对前方为一种禁止车辆停车响应很差,未来提供了ACC功能则更进一步。
文章图片

文章图片
【 『车道线』为什么自动驾驶这么难?】过融合三目摄像头和毫米波雷达的信息,更准确的判断前车的类型位置和速度,甚至可以在拥堵路段走走停停。基于三目摄像头识别到的车道线信息,通过车道线模型和路径规划算法控制车辆,保持在车道内行驶。

稿源:(豆豆看娱乐乐)
【】网址:/a/2020/0521/ahnews44663.html
标题:『车道线』为什么自动驾驶这么难?
上一篇:#酒后驾驶#可恶!石排马路上又现2只"醉猫"
下一篇:『电动车』福州南门兜周边路口 交警1小时查纠35起电动车违法
![]() 人文
人文
李继轩■足球经纪人李继轩“青训补偿协议也需要有资质”
阅读(30)
当然你还得有很强的谍报汇集才能,分析哪支球队将来须要什么样的球员和锻练”。在多年来的职业生活中,李继轩也介入过不少国内球员的转会运作,上到中超、下到中乙,甚至还有...
![]() 人文
人文
『张雅新律师』张雅新律师ll集资参与人,千万别遗漏了这些问题
阅读(32)
2.集资参与人务必按时间节点到指定地点进行集资情况的核实登记,如实提供相关材料,并配合做好核实登记等工作。逾期未登记者,视为自愿弃权,后果自负。3.故意编造虚假信息,干...
![]() 人文
人文
「酒精含量」这仨绝对是过命交情,同桌饮酒,同一地点,因酒驾相继被查
阅读(46)
仅仅过了不到4分钟,在同一地点,执勤交警又查获了两起酒驾,浙J731**轿车驾驶员丁某花呼气酒精检测结不雅为111mg/100ml,涉嫌醉酒后驾驶灵活;浙J6AQ**轿车驾驶员张某俊呼气酒精检测...
![]() 人文
人文
[救命]又到了电动车燃爆的季节:你要知道这几个关键问题,可以救命保财
阅读(34)
大年夜车身贴纸断定,该车应属于本地某网约车平台,视频中的火势异常凶悍,且殃及旁边车位的一辆奥迪轿车。5月4日,新疆阿克苏一小区内,一辆电动汽车也产生自燃,经消防扑救后...
![]() 人文
人文
『战场』青春正好·感谢每一个在年轻的战场上逆行的你!
阅读(27)
疫情是试金石,展示青年的担当;抗疫是催化剂,砥砺青年的成长。逆行出征、火速驰援湖北,在抢救病人的病房、“红区”决逝世奋战,在火神山病院、雷神山病院的建筑工地挥汗如...
![]() 人文
人文
「北青网」谜之操作!资深牌友想戒赌,凌晨打110举报棋牌房老板娘
阅读(17)
30多岁的王某是这里的老客,他一直在这里赌,也输了很多钱。王某说,当天晚上,他本来到这里是要劝开赌场的老板娘关门的。他想戒赌瘾,但问题是只要这个赌场在,他就控制不住自...
![]() 人文
人文
「江龙」江龙船艇2019年净利3404万元 增长9.35% 董事长薪酬40万
阅读(31)
挖贝网材料显示,江龙船艇重要大年夜事旅游休闲船艇、公事法律船艇和特种功课船艇的设计、研发、临盆和发卖,为客户供给大年夜应用设计、产品制造到维修移揭捉等全方位的个...
![]() 人文
人文
[城郊乡宣传]新野县城郊乡:支部书记摆擂台,争当一流竞风采
阅读(12)
此次大比武,比的是成绩,找的是差距,学的是经验,增的是干劲。各位支部书记要用实际行动兑现“干在实处,走在前列”的庄严承诺。通过此次擂台,各位书记补好短板,要扛起脱...
![]() 人文
人文
【激发】从“嗦粉”品茶,到“云嗨”撸虾——长沙催热“烟火气”激发消费信心
阅读(38)
但跟着疫情来袭、商户关张,这些“好梦日常”一度成了奢望。
长沙清醒,是大年夜一碗米粉开端的。
“在街道社区赞助下,我们2月17日恢复竽暌躬业,如今生意不错。”长沙市“冶旧...
![]()
阅读(24)
让生鲜“借光”售卖,其实由来已久,早在1984年,本报就曾经报道过利用灯光把肥肉馅儿“变”瘦肉馅儿的事,现在不过是钨丝灯换成LED灯,视觉原理、商业动机都没有变。应该变的是...
