中科院苏州纳米所仿生人工肌肉研究获进展
傻大方提示您本文标题是:《中科院苏州纳米所仿生人工肌肉研究获进展》。来源是茶无弄。
中科院苏州纳米所仿生人工肌肉研究获进展。苏州|肌肉|进展|研究|中科院---
仿生人工肌肉材料是20世纪90年代迅速发展的一类新型智能材料,正不断地掀起全球科学家的研究热潮,在航空航天、仿生机器人以及生物医疗等工程领域具有重要的应用价值。离子聚合物-金属复合材料(Ionic polymer-metal composites, IPMC),也称为电化学驱动器,是一种典型的仿生人工肌肉材料。它是由两层电极与离子聚合物组装而成的三明治结构,在电场作用下,依靠离子在电极界面的可逆脱嵌过程,实现电能与机械能的转换。因其低电压驱动、柔性大变形等特性,在软体机器人、智能穿戴以及医疗器械等方面的应用前景广阔。
目前,学术界公认的IPMC材料驱动机制是电容致动机理,在驱动电压刺激下,一定数量的离子在电极层中的预膨胀、嵌入、嵌出,引起电极材料的可逆膨胀与收缩效应,这种效应导致驱动器的宏观应变。换言之,电极材料储能越大,驱动效应越强。基于此机制,各种高储能的纳米材料都被尝试用作IPMC电极,驱动性能相比于传统IPMC材料得到大幅提升,但较实际应用仍存在较大的差距,曾一度成为人们难以理解的困惑。究其原因,储能与驱动性能之间并不总是正相关的,它们之间存在一个能量转换效率的问题。经过大量的调研与探索,研究发现电极的能量转换效率主要由材料的电学特性、孔道构型、分子结构以及力学特性等复杂因素决定。因此,想要在驱动性能和应用上取得突破,就必须发展新型纳米结构活性材料,探索新的储能-转换机制。
近日,中国科学院苏州纳米技术与纳米仿生研究所研究员陈韦课题组,中科院院士、中科院化学研究所研究员李玉良,与香港理工大学教授陶肖明等合作,设计制备了一种基于石墨炔新材料的电化学驱动器,并从石墨炔材料微观分子驱动机制的发现,到宏观驱动器件的高能量转换效率驱动特性,开展了全面系统的研究。研究提出并实验验证了一种新型分子驱动机制——石墨炔烯炔互变效应,该机制完全不同于传统的电容驱动机制,它是基于可逆配位转换效应引起的材料结构变化,如图1所示。由于常规检测手段(如:拉曼、红外等)难以捕捉这一分子尺度的配位转换效应,研究人员创造性的利用高灵敏的原位和频共振光谱技术,从实验上验证了这一分子驱动机制,如图2所示。正是由于这种活性功能单元的作用,石墨炔IPMC柔性电极表现出优异的电化学储能特性,也表现出电-机械能量转换能力。石墨炔驱动器比电容高达237 F g-1,倍率特性良好,换能效率高达6.03%,远高于同类电化学换能器件,能量密度高达11.5 KJ m-3, 与哺乳动物生物肌肉能量密度相当,将电化学驱动器的性能提升到了新水平,如图3所示。相关成果发表在《自然-通讯》上。
研究工作得到了国家自然科学基金、江苏省科技计划项目(产业前瞻与共性关键技术),中科院国际合作重点项目等的资助。
苏州|肌肉|进展|研究|中科院---傻大方小编总结的关键词
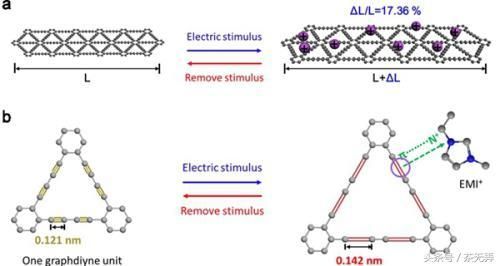
图1.基于石墨炔材料的烯炔互变分子驱动机制示意图
苏州|肌肉|进展|研究|中科院---傻大方小编总结的关键词
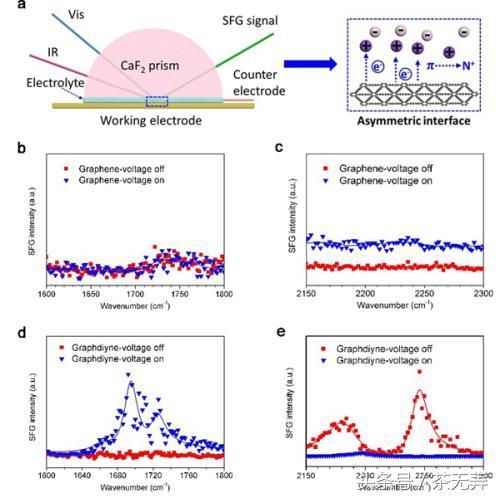
图2.利用原位和频共振光谱技术验证石墨炔材料烯炔互变分子驱动机制
苏州|肌肉|进展|研究|中科院---傻大方小编总结的关键词
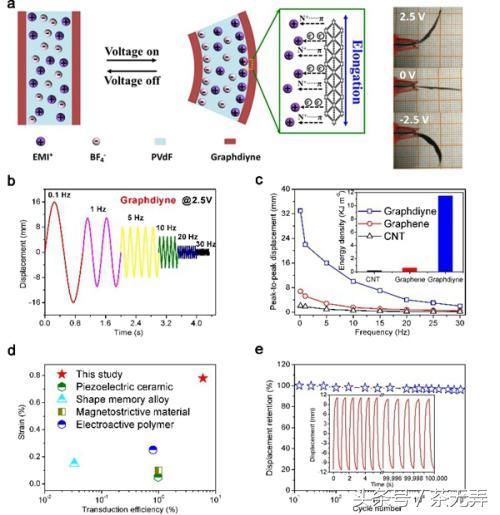
图3.石墨炔电化学驱动器性能表征
- 免费!这几十项收费统统取消!苏州人不知道就亏大了!
- 中科院与恒大达成全面合作 涉及生命科学、航天等高科技领域
- 中科院沈阳分院及山东中心领导来访
- 重磅!苏州市公交扫码支付今天上线,先乘车后付费,不用担心没零
- 民生丨苏州人挺住!这个月起,你到手的工资可能要变少了…...
- 上周苏州二手房成交1351套,长假小幅下降!
- 稻香村重复收取包装钱,顾客一怒报了警,原来是苏州...
- 苏州楼市将重蹈南京覆辙,一二手房价现报复性倒挂!
- 外运十周年系列活动,根本停不下来!
- 苏州市体育运动与赛事医疗保障指导中心揭牌