MotoSimEG-VRC软件:安川机器人弧焊焊接离线编程( 三 )
Targets:Targets功能区中 , 选中“Pick”选项后可以在软件工作区中选取要修改的机器人程序目标点 , 当然选取程序目标点也可以通过在Path Content中选择相应的机器人程序实现 。 点击“Modify”按钮 , 可以在弹出的Modify Position对话框中以增量形式修改机器人程序目标点的位置与姿态 。
Adjust Positioner:对于具有变位机的机器人系统 , 可以通过点击“Adjust Positioner”按钮 , 在打开的Positioner Adjustment对话框中激活变位机自动调整功能 , 以实现变位机与机器人联动运行时保持固定的弧焊焊接条件 , 如焊接接头类型、焊枪姿态等 。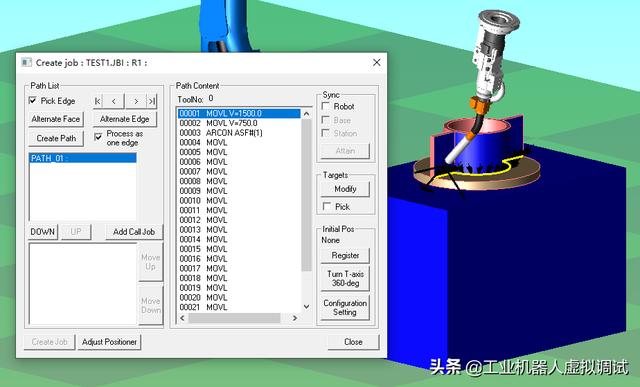 文章插图
文章插图
【MotoSimEG-VRC软件:安川机器人弧焊焊接离线编程】机器人程序测试优化完成后 , 在Path Content中选择第一行程序 , 然后在Initial Pos功能区中点击“Register”按钮 , 将选中的程序目标位置作为机器人的初始位置 。
在Path List中选择机器人路径轨迹PATH_01 , 然后点击“DOWN”按钮 , 使其显示在下方的展示框中 , 此时“Create Job”按钮被激活 。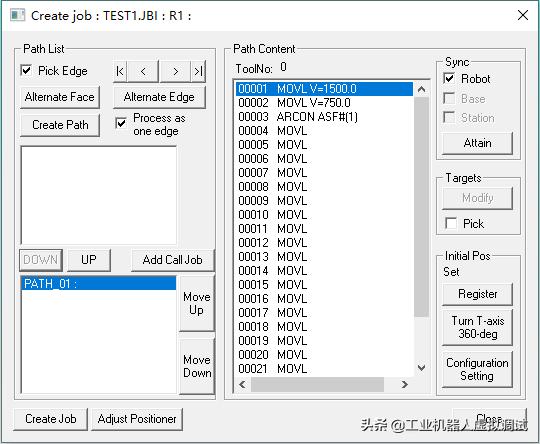 文章插图
文章插图
点击激活的“Create Job”按钮 , 将自动生成的机器人路径轨迹程序转换为机器人控制器可执行的工作程序 。 若是程序转换成功 , 则会弹出“Job convert is successful.”信息提示框 , 点击“确定”按钮即可 。
打开虚拟示教器 , 在JOB中可以看到与CAM Job Management中同名的程序 , 此程序就是使用CAM Function自动生成的机器人程序 。 将其打开之后 , 可以看到详细的机器人运动程序以及弧焊焊接起弧、熄弧程序 。 文章插图
文章插图
仿真运行在软件“Simulation”菜单栏下 , 点击“Start”命令按钮 , 可以看到机器人按照离线生成的弧焊焊接程序对工件进行焊接加工 , 如下动态图所示 。 运行结束后点击“Reset”命令按钮 , 恢复工作站初始状态 。 文章插图
文章插图
The End
上一篇:MotoSimEG-VRC软件:基于伺服焊枪的机器人点焊仿真
- 删除|电脑老是自动安装软件,有时还自动跳出广告对话框,必须要根治!
- 华为鸿蒙系统|牛!龙芯二进制翻译功能,可运行安卓、windows、linux软件
- 软件|轻松搞定复杂的结构图与关系图
- 软件|科普时间到:显示圈刷屏的QD-Mini LED到底强在哪?
- 软件|A14芯片+视网膜屏幕,暴跌2000多元后,真香旗舰更受欢迎
- 软件|中国明明有了北斗导航,为什么还要处处用GPS呢?不用不行吗?
- 软件|后疫情时代,低代码开发平台迎来新机遇。
- 任务管理|电脑内有个重要的功能几乎没人用,任务管理器,软件维修离不开它!
- 人工智能|Gartner:2022年全球人工智能软件市场规模将达620亿美元
- m威马将正式向W6用户推送living mate 3.3版本升级软件