MotoSimEG-VRC软件:安川机器人弧焊焊接离线编程( 二 )
Alternate Face:切换机器人示教点TCP坐标的参考平面 。
Alternate Edge:当有多个轨迹特征时 , 用于切换已选取的边缘特征 。 文章插图
文章插图
生成路径程序参数设置机器人运行路径特征选取完成之后 , 在Create job对话框中点击“Create Path”按钮 , 弹出Path Settings对话框 , 在此对话框中可以设置生成机器人运行路径轨迹的程序参数 。 同时 , 软件工作区焊接零件模型上选取的机器人焊接路径轨迹上出现一个“1” , 表示选取的三段路径轨迹合并为一条路径轨迹 。
Teaching选项卡用于设置自动生成机器人示教程序的运动参数 。 其中 , Start Point与End Point功能区设置机器人焊接起始点与结束点运动程序生成参数 , 包含插补类型Motion Type、运动速度Speed、定位精度PL等;Tool Setting功能区设置机器人末端工具编号;Intermediate Point(s)功能区设置机器人整体运行路径轨迹上的过渡点参数 , 生成方式(Generation Mode)包含自动生成Automatic、手动生成Manual两种 , 自动生成的相关参数可以在Special选项卡中查看与设置 , 手动生成参数中可以设置过渡点的插补类型、过渡点生成形式(按距离形式Step Pitch或按个数Number of Steps)以及过渡点的运动速度、定位精度 。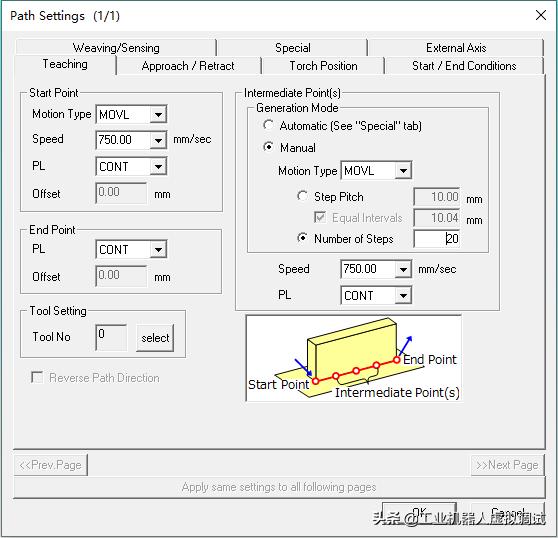 文章插图
文章插图
Approach/Retract选项卡用于设置机器人焊接路径起始点的接近点与结束点的离开点的运动参数 。 对于机器人弧焊焊接应用程序 , 一般都需要添加接近点与离开点 。 接近点功能区与离开点功能区分别选中“Add”之后 , 其下方的参数设置选项被激活 。
在Position功能区域下分别选择“Target Coord.” , 即以机器人弧焊焊接路径的起始点与结束点坐标系作为创建接近点与离开点的参考坐标系 。 然后在其下的X、Y、Z坐标值输入框中输入要平移的增量数值 , 并修改机器人程序的插补类型、运动速度、定位精度等参数 。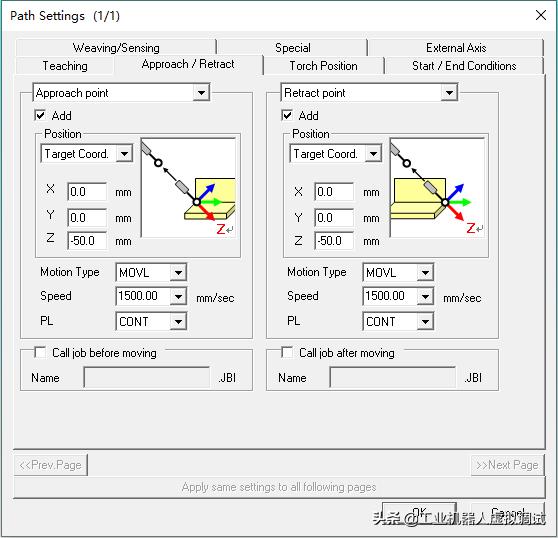 文章插图
文章插图
Torch Position选项卡用于设置机器人焊枪姿态参数 , 此选项卡只有在选择弧焊焊接工艺应用(Arc Weld)时才会显示 。
Joint Orientation:指定要焊接的接头形状 , 有V形(V-Shape)与L形(L-Shape)两种可选 。
Work Angle:设置焊枪与参考平面之间的角度值 。
Travel Angle:设置焊枪与垂直于焊缝的平面之间的角度值 。
Rotation Angle:设置焊枪自身的旋转角度值 。
Joint Offset:Vertical用于设置焊枪与焊接工艺点之间垂直方向的平移量 , Horizontal用于设置焊枪与焊接工艺点之间水平方向的平移量 。
Without ARCON/ARCOF instruction:选中此选项后 , 生成的路径程序中将不包含ARCON/ ARCOF指令 。
Corner Processing:当沿着拐角连续焊接多条焊缝时 , 为了使过渡平滑 , 拐角处理功能允许在拐角的定义距离内逐渐改变焊枪角度 。 其中 , Before Corner用于设置在拐角之前的过渡距离 , After Corner用于设置在拐角之后的过渡距离 。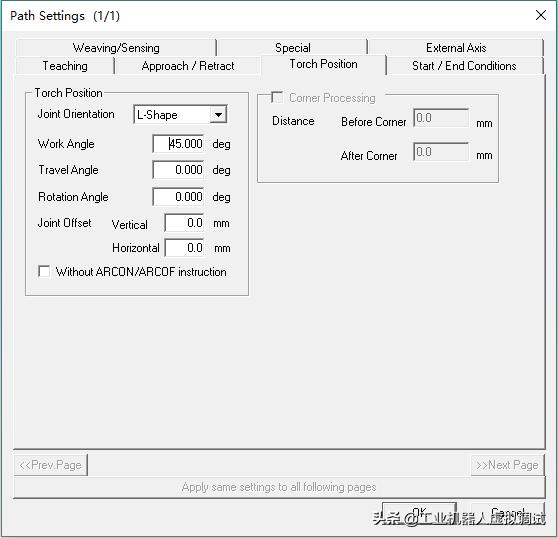 文章插图
文章插图
Start/End Conditions选项卡用于设置机器人弧焊焊接的起弧与熄弧工艺参数 , 一般情况下起弧与熄弧参数都选择文件编号的形式 , 然后在示教器的焊接参数设定界面中对选定编号的焊接参数进行统一配置 。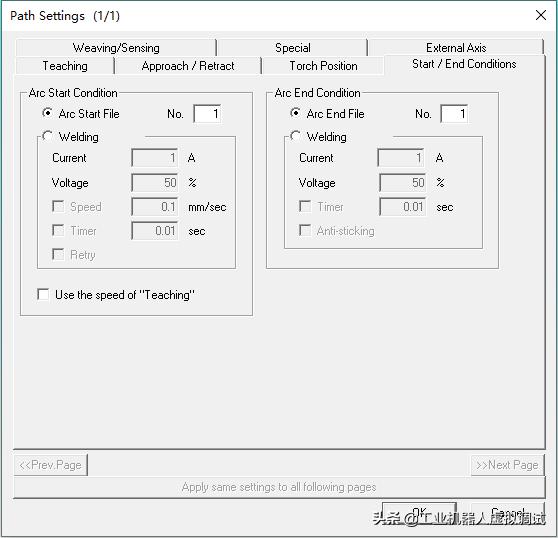 文章插图
文章插图
若是焊接工艺标准中还有焊接摆动要求 , 可以在“Weaving/Sensing”选项卡中配置机器人的摆弧参数 。 若是工作站中还有外部轴并且需要与机器人联动运行 , 如机器人行走轴或变位机等 , 可以在“External Axis”选项卡中配置相关参数 。
Path Settings对话框中生成机器人运行路径轨迹的程序参数全部配置完成后 , 点击“OK”按钮 。
生成路径程序测试与后处理在弹出的Create Job对话框中 , Path List功能区下生成机器人弧焊焊接路径PATH_01 , 同时软件工作区焊接零件上出现带有黑色坐标系与黄色轨迹线的机器人弧焊焊接路径轨迹 , 机器人焊接路径轨迹的接近点处出现焊枪模型 。
选中PATH_01之后 , 在Path Content下显示PATH_01的机器人运动程序 , 此时就可以对自动生成的机器人程序进行优化处理了 。
Sync:在Sync功能区中可以对生成的机器人路径轨迹程序运行测试 。 在Path Content中选择机器人运动程序 , 然后点选“Robot”选项后机器人将移动到选中的程序目标点位置处 。 点击“Attain”按钮 , 机器人将按照Path Content中的程序运行 , 并检查程序中的路径点是否可达 。 若是Path Content中的程序目标点全部可达 , 则光标会停留在最后一行程序;若是有程序目标点不可达 , 则该条程序将红色高亮背景显示 。
- 删除|电脑老是自动安装软件,有时还自动跳出广告对话框,必须要根治!
- 华为鸿蒙系统|牛!龙芯二进制翻译功能,可运行安卓、windows、linux软件
- 软件|轻松搞定复杂的结构图与关系图
- 软件|科普时间到:显示圈刷屏的QD-Mini LED到底强在哪?
- 软件|A14芯片+视网膜屏幕,暴跌2000多元后,真香旗舰更受欢迎
- 软件|中国明明有了北斗导航,为什么还要处处用GPS呢?不用不行吗?
- 软件|后疫情时代,低代码开发平台迎来新机遇。
- 任务管理|电脑内有个重要的功能几乎没人用,任务管理器,软件维修离不开它!
- 人工智能|Gartner:2022年全球人工智能软件市场规模将达620亿美元
- m威马将正式向W6用户推送living mate 3.3版本升级软件