提出了一|【泡泡一分钟】基于三维子图显著性的主动SLAM在水下体积探测中的应用
每天一分钟,带你读遍机器人顶级会议文章
【 提出了一|【泡泡一分钟】基于三维子图显著性的主动SLAM在水下体积探测中的应用】标题:Active SLAM using 3D Submap Saliency for Underwater V olumetric Exploration
作者:Sudharshan Suresh, Paloma Sodhi, Joshua G. Mangelson, David Wettergreen, and Michael Kaess
来源:2020 IEEE International Conference on Robotics and Automation (ICRA)
编译:姚潘涛
审核:柴毅,王靖淇
这是泡泡一分钟推送的第 635 篇文章,欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权
摘要
本文提出了一种利用多波束声纳进行三维水下环境体积探测的主动SLAM框架。最近在集成SLAM和planning方面的工作是在保持体积自由空间信息的同时进行定位。然而,缺少信息性的闭环会导致不完美的建图,从而导致不安全的行为。为了解决这一问题,我们提出了一种导航策略,通过平衡体积探测和重访来降低车辆姿态的不确定性。为了确定要重新访问的位置,我们根据真实世界的声纳数据构建一个三维可视化字典,并计算子映射显著性的度量。基于传播的姿态不确定性和传感器信息增益来选择重访动作。在我们的位姿图SLAM公式中,闭环被整合为约束,这些约束会使全局占用栅格地图变形。我们评估了我们在模拟和真实世界实验中的性能,并强调了与不确定性无关的框架相比的优势。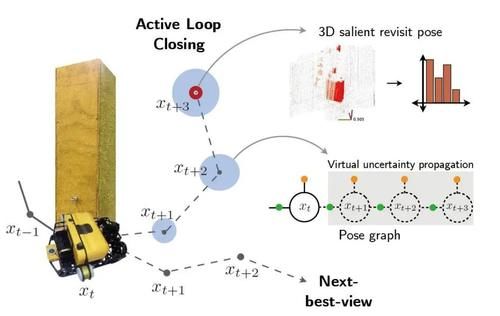
文章插图
图1 提出了一种基于声纳传感的水下探测主动SLAM框架。它使用3D显著性度量来维护闭环的候选重访位置。我们的方法跟踪最大允许不确定度,并在下一个最佳视图探索和重访之间进行选择。通过优化底层位姿图对车辆状态估计和自由空间进行修正。
图2 从真实声纳数据离线构建3D子图场景字典的过程。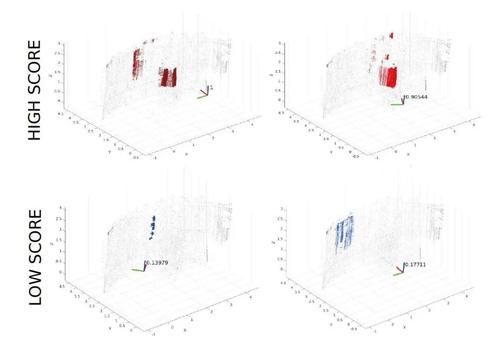
文章插图
图3 从收集的数据日志中获得最高/最低光泽分数。灰色点云表示全局贴图,彩色部分显示属于重访姿势的子贴图。它们是根据分数的大小来着色的。车辆的6自由度姿态与光泽评分一起可视化。我们看到光鲜的分数和良好的循环结束候选者之间的相关性。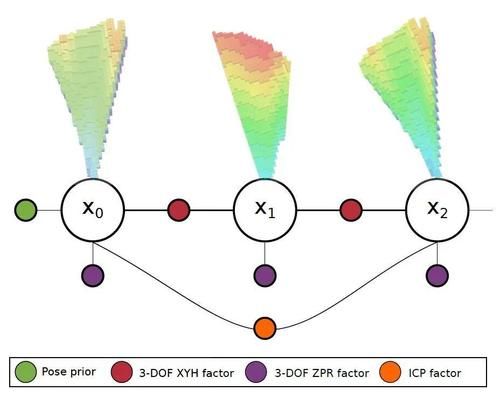
文章插图
图4 我们基于Teixeira等人使用的姿态图公式。节点xi表示车辆姿态,具有里程限制和姿态先验。调整了针对车辆漂移的姿态和相应的局部占用栅格地图之间的闭环约束。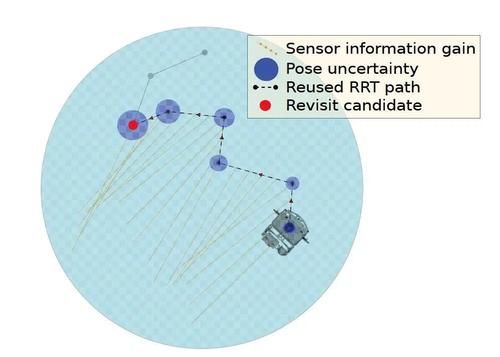
文章插图
图5 我们重用次佳视图RRT路径导航到重新访问的位置。为了传播不确定性,我们沿着树的顶点添加虚拟里程表,并计算候选位置的不确定性。为了计算传感器信息增益,我们对路径进行插值并沿路径累计未映射体素的数量。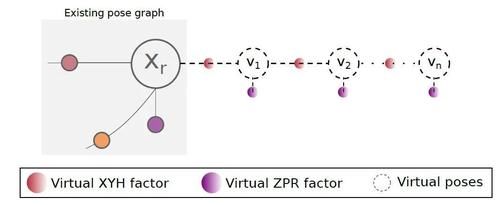
文章插图
图6 向现有姿势图添加虚拟节点。这里xr是机器人当前的姿势,vi是一个虚拟的姿势节点,有里程计因素。图在候选姿势vn处终止。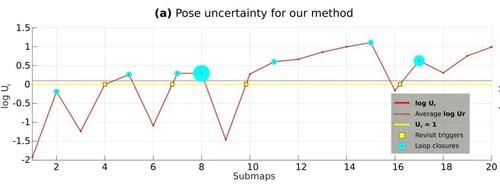
文章插图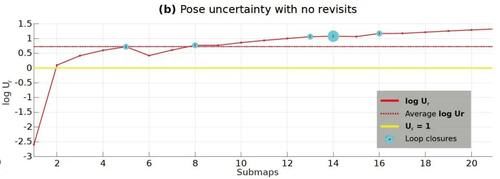
文章插图
图7 对数标度不确定比与子贴图(对于使用20个子贴图运行的示例)。青色圆圈表示回路闭合,黄线表示允许的不确定度阈值。(a) 我们的方法:黄色标记表示触发重新访问策略。由于信息闭环,平均不确定度比率接近该阈值。(b) 无重访方法:在这里,由于缺少信息性的闭环,平均不确定度比率被移走。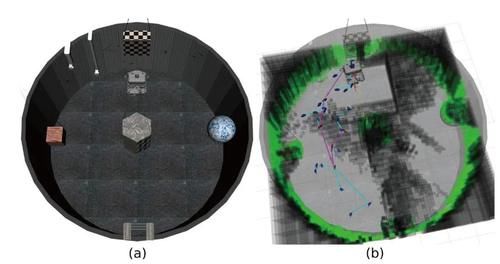
文章插图
图8 (a)用HAUV做gazebo仿真。该环境是真实世界坦克环境的度量模型(图12),目标是不同的几何形状。(b)我们基于传感器信息增益来生长RRT树,并且Octomap维护着自由,未知和占用的空间。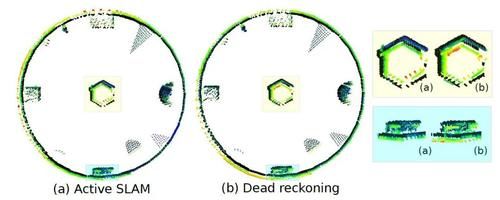
文章插图
图9 地面真实点云和合成图,热图显示云到云的误差。此全局映射是模拟环境中20个子映射的排序。对于中心桩和梯子等结构物,与我们的方法有更好的一致性。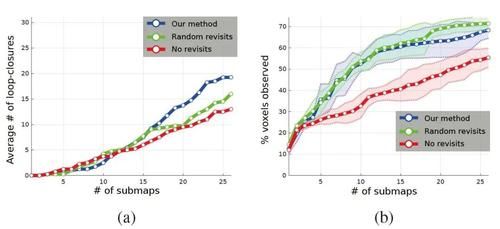
文章插图
图10 (a)子图上闭环的平均次数。这三种方法的性能均低于10个子图。除此之外,我们的方法试图将车辆引导回良好的闭环位置,从而超过基线。(b)子图中未知体积中观察到的体素的平均百分比。我们的方法能够执行更多的闭环,而不会影响观察到的体素数量。在不重访的情况下,百分比较低的原因可能是由于我们传感器的几何形状。使用线传感器时,我们会错过在初始遍历中观察到的体素,然后在重访轨迹中观察到这些体素的情况。
- 抖音|抖音如何获取更多流量?一文读懂直播自然流量提升技巧
- 亏损|爱奇艺"水逆"一整年
- 华为鸿蒙系统|鸿蒙是安卓“换皮”产品?一亿多用户,难道还不足以说明问题
- playstation5|手慢就没有了!索尼PS5国行版将在双十二补货:库存一万台
- 基站|华为一手养肥的这家小巨人,真这么值钱吗?
- 小米科技|比双十一的价格还低!小米11pro还值得入手吗?
- oppo reno|到OPPO线下体验了一番,终于知道Reno7系列为什么卖得这么好了
- 索尼Xperia|力压iPhone13 Pro Max,续航排名第一,仅售1699元
- 优派|美国很满意:150多家芯片厂商,都“自愿”提交了详细数据
- |跌至3099元!8GB运存+128GB+骁龙865,唯一缺陷不是新手机