DELMIA虚拟仿真:机器人程序自动生成功能介绍与使用方法( 二 )
Max Chord Length:用于定义机器人路径轨迹曲线的最大弦长 , 默认值为100.00mm 。 Max Chord Length与Sag两个参数选项共同决定了生成的机器人路径轨迹程序示教点的密集程度 。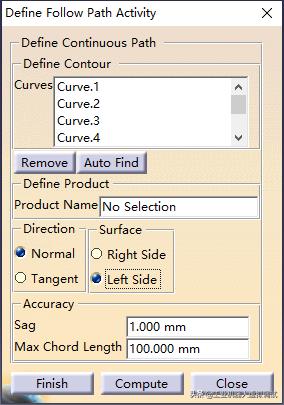 文章插图
文章插图
路径程序生成参数设置完成后点击下方的“Compute”按钮 , 软件工作区的工件模型上显示机器人路径轨迹示教点 , 每一个示教点均以绿色高亮显示 。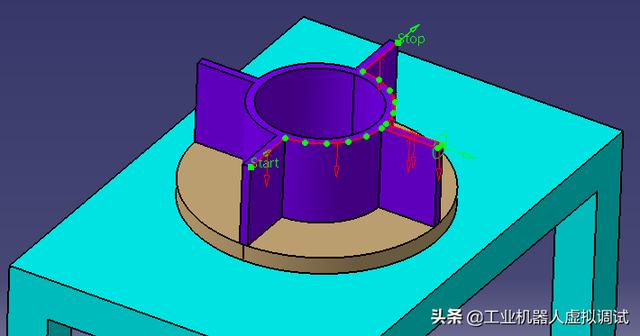 文章插图
文章插图
确认无误后点击“Finish”按钮 , 左侧PPR浏览树的机器人任务RobotTask.1下生成工件加工程序“FollowPathActivity.1” 。 文章插图
文章插图
使用“Process Simulation”命令可以对自动生成的机器人加工程序进行仿真运行 。
机器人示教程序生成使用Create FollowPathActivity功能自动生成的机器人运行程序是不支持二次编辑的 , 仿真人员不能在其上直接添加功能指令 , 但是可以利用自动生成的运行程序创建可编辑的机器人程序 。
鼠标右击机器人程序“FollowPathActivity.1” , 在弹出的快捷菜单中依次选择“Follow PathActivity.1对象”→“Create New Robot Task” 。 此时 , 在TaskList资源节点下自动生成可编辑的机器人任务“RobotTask.2” 。 同时PPR浏览树中也会自动生成机器人示教点坐标组“FollowPathTagGroup.1” , 在其下包含所有的机器人示教点坐标 。 软件工作区的工件模型上也会显示出机器人示教点的坐标系 , 如下图所示 。
在机器人程序RobotTask.2中可以对机器人程序进行二次编辑 , 如机器人姿态优化、交互信号指令添加或者导出离线程序等 。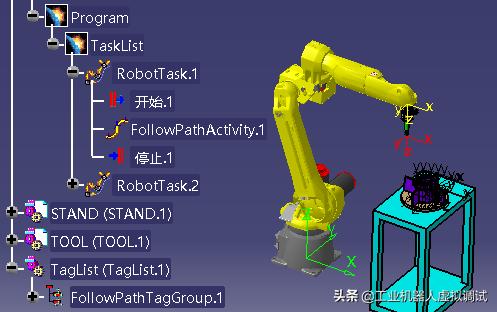 文章插图
文章插图
The End
【DELMIA虚拟仿真:机器人程序自动生成功能介绍与使用方法】上一篇:DELMIA软件:机器人涂胶仿真操作方法
- 英伟达|Linux下使用KVM虚拟机安装华为OpenEuler系统
- 半导体|台积电董事长刘德音:未来10年将会感受到真实与虚拟世界结合
- vivo|OriginOS持续预热,大家关注的却是vivo的虚拟新机
- 虚拟现实|企业培训直播行业分享
- 虚拟世界|元宇宙很远,但民宿场景变革的「盛宴」却很近了
- 虚拟主机|个人网站如何选择主机?
- 虚拟助手|2022年全球人工智能软件市场规模将达620亿美元
- 知识产权|蓝色光标:公司自有知识产权的虚拟人将在今年年底或明年年初推出
- 虚拟人|蓝色光标:公司自有知识产权的虚拟人将在今年年底或明年年初推出
- 虚拟货币|鄂尔多斯高新区:落实虚拟货币“挖矿”整治工作