自行车能自平衡?机器狗走梅花桩?腾讯 Robotics X 实验室研究首次“开箱”
11月20日 , 腾讯公布了其在移动机器人研究方面的新进展:自平衡轮式移动机器人和四足移动机器人 Jamoca 首次对外亮相 。
据悉 , Jamoca 是国内首个能完成走梅花桩复杂挑战的四足机器人 , 而自平衡轮式移动机器人的相关研究成果还入选了机器人行业的顶级会议 IROS 2020 。 这两项进展均来自腾讯 Robotics X 实验室 , 属于移动方向上的技术突破 , 也是机器人最基础的能力之一 。 据了解 , 腾讯 Robotics X 实验室于2018年成立 , 致力推进人机协作的下一代机器人研究 , 打造虚拟世界到真实世界的载体与连接器 。 目前实验室主攻移动、灵巧操作和智能体等三大通用机器人技术的研究与应用 , 并聚焦于多模态移动机器人的研发 。
静止、行进均能自主保持平衡的轮式机器人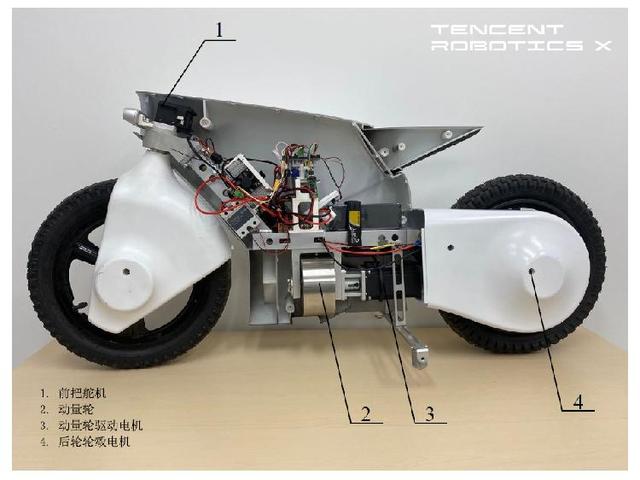 文章插图
文章插图
△自平衡轮式移动机器人的硬件平台完全由腾讯Robotics X自研 , 重约15公斤 , 长1.15米 , 高0.52米
此次亮相的自平衡轮式移动机器人 , 也可称之为自平衡自行车 , 是腾讯 Robotics X 实验室的首个整机自研机器人 。 它在传统轮式移动机器人的基础上 , 增加了动量轮及其电机驱动系统 , 使得机器人可以在静止及行进状态下均保持平衡不倒 。 文章插图
文章插图 文章插图
文章插图
据悉 , 该机器人的控制能力又可以细分为行进中的动态自平衡和停止行进时的静态自平衡 。 行进中的动态自平衡是依靠前把转动进而带动车身的转动实现 , 而停止行进时的静态自平衡则采用动量轮力矩平衡技术 , 应用角动量守恒的原理实现自平衡控制 。 依靠平衡算法 , 即使受到一定的外界干扰 , 腾讯自平衡轮式移动机器人仍然可以在保持自平衡状态的同时 , 实现平稳地向前行驶 。 机器人在不同的路面状况下 , 例如遇到上下坡时 , 也都表现出了较好的运动能力和平衡性能 。 甚至对于行驶路径上存在特定约束的情况 , 比如沿着独木桥行驶的场景 , 它也能从容应对 。 文章插图
文章插图
四足移动机器人 Jamoca :能走、能跑、能跳 , 可挑战梅花桩复杂地形
四足移动机器人 , 更常见的一个名字是机器狗 。 腾讯 Robotics X 实验室在外部提供的本体之上 , 基于自研的机器人控制技术 , 为 Jamoca 打造了一个能应对复杂环境的智能大脑 。 这个大脑让 Jamoca 能行走、小跑和跳跃 , 并赋予了它自主定位和避障的能力 。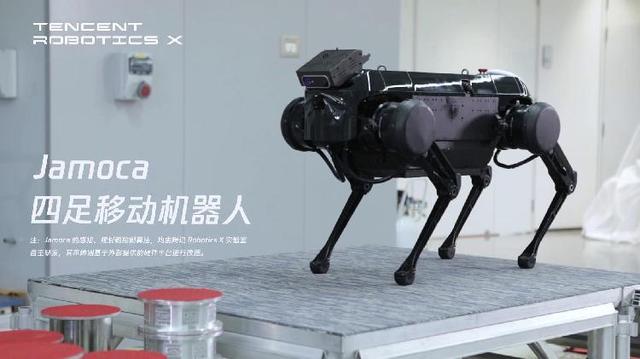 文章插图
文章插图
△Jamoca 本体基于外部提供的硬件平台改装 , 重约70公斤 , 长1米、宽0.5米、站高0.75米
【自行车能自平衡?机器狗走梅花桩?腾讯 Robotics X 实验室研究首次“开箱”】此次 Jamoca 完成的挑战由高60厘米、呈20°斜面角度的台阶和邻桩最大高度差16厘米、间距不等的梅花桩两部分组成 。 据腾讯 Robotics X 实验室研究员介绍 , 和国际上其他四足机器人走木块的场景比较 , 此次 Jamoca 所挑战的梅花桩落脚面积更小、高度更高 , 并有台阶的组合 , 实现的难度要更大 。 其中 , 考验机器人移动能力的难点主要有两个:理解梅花桩的排布(包括位置和高度)、选择最佳落脚点及路线并稳定精准地行走(落脚到梅花桩中心点) 。 这正对应了实验室在移动技术方面钻研的的两个核心技术模块:感知、运动规划与控制;同时二者通过实验室的另一核心技术模块:整机系统设计与搭建 , 实现了系统性的集成融合 。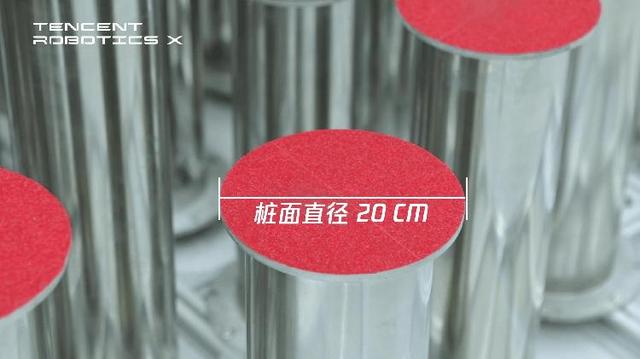 文章插图
文章插图
从 Jamoca 挑战的结果看 , 腾讯 Robotics X 实验室已经达到了极高的技术标准——误差1厘米内的感知定位、根据环境进行的10毫秒级路线规划、基于动力学的1KHz实时力矩控制、梅花桩中心点1厘米内的落脚误差 , 以及全系统的高度协同 。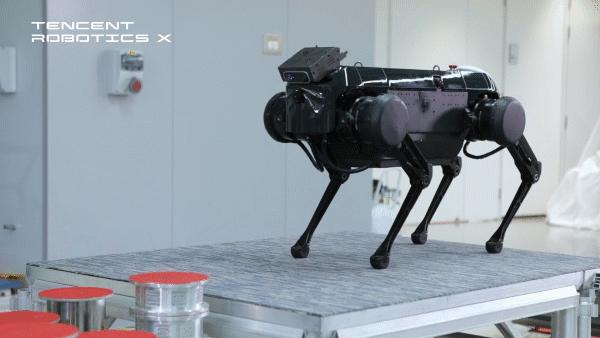 文章插图
文章插图
在精准环境感知方面 , Jamoca 创新性地实现了鲁棒的眼脚标定 , 并利用RGB-D相机对周围环境进行实时的感知 。 通过特征点匹配的方式 , 对 Jamoca 自身的运动轨迹进行在线跟踪 , 并将基于视觉的定位信息与基于运动学的里程计信息和 IMU(Inertial measurement unit , 惯性测量单元) 数据进行融合 , 提高了定位追踪的精度和频率 。 同时利用算法识别和提取出台阶和梅花桩的表面区域范围和中心点位置 , 将定位和识别的数据进行融合 , 从而重建出整个三维运动场景 。
- 调整|谁说平衡车是年轻人的专利?360平衡车P1初体验
- 特斯拉造自行车,也许就是这个样……
- 碰疼了会躲!这个植入“迷你大脑”的AI机器人,可感知疼痛,还能自我愈合
- 手机|开化公共自行车可以手机扫码租车咯!绿色出行,方便快捷→
- 360闯入平衡车市场,最大的竞争对手是“山寨或不知名品牌”
- 小时|好消息!无桩公共自行车来了!1小时内免费使用…
- 「视频」筑博会上传来好消息,这种电动自行车库可自动“上楼”充电
- “克塞号”的时空隧道?我又把娃的360平衡车V1 Pro爽了
- 聊聊白平衡「夏昆冈」
- 美国专家:14亿人都生产不出光刻机,还能自称制造大国?