木牛流马|从“妄想”到现实 自动驾驶的昨天、今天和明天( 四 )
2013年,包括奥迪、福特、沃尔沃、日产等传统车企开始认真发力自动驾驶,同时期还出现了一大批自动驾驶初创公司。
也是这一年,埃隆马斯克发了一条推特:“特斯拉要为Model S开发辅助驾驶系统,紧张的工作正在进行中”。两年后,特斯拉Autopilot正式问世,成为市面上最好用的L2级辅助驾驶系统,量产车领域的自动驾驶之战打响。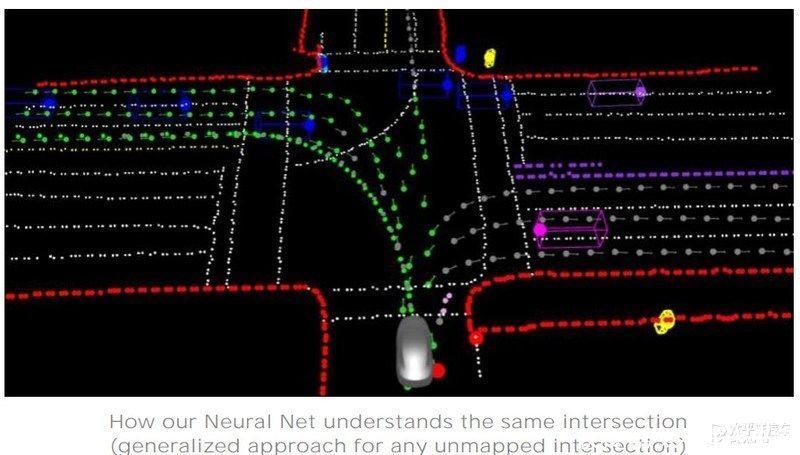
文章插图
仅仅5年的时间,高阶的L2级辅助驾驶已经得到了普及。而特斯拉最新的FSD理论上已经实现了L3,甚至更高等级的自动驾驶功能(受制于法规,仍然需要驾驶员监视路面,保持手握方向盘并随时接管车辆),当然还有国内蔚来的NOP和小鹏的NGP。
今天的自动驾驶早已完全不同于早期铺设电缆的粗暴方式,也不同于基于早期人工智能的笨拙。卷积神经网络和深度学习的突破进展赋予了如今自动驾驶更加强大的功能。
文章插图
自动驾驶能够如此快速的取得实用化的进展远不止是人工智能领域的突破,更依赖各个科技领域的飞跃式发展。芯片如今已经进入5nm时代,而大数据方面,近年来数据量的衡量单位已经从TB跃升至PB、EB乃至ZB的量级。IBM在2016年之前的的研究表明,整个人类文明产生的全部数据量,90%来自近5年。而此后短视频等社交网络的兴起让这一数据量变得更加可观,这就为深度学习提高了硬件和海量数据的基础。
而5G网络、高精度地图、车规级激光雷达等等技术的落地,也进一步促进了自动驾驶的成熟。我们此前曾介绍过今天的自动驾驶汽车如何运转,点击下图了解。
文章插图
明天:未来可期
纵然在实用层面取得了丰硕的成果,但自动驾驶直到今天仍然还不是一项成熟的技术,关于自动驾驶未来如何发展存在着巨大的争议,没有谁能给完全确定到底谁是对的。无人驾驶汽车终将实现或许是唯一可以确定是事情。
在二十世纪三十年代之前,人类对自动驾驶的初级探索主要集中在“单车自动驾驶能力”上;1939年通用Futurama概念展示了车与路、车与城市互联协同的V2X路线;六十年代之后随着人工智能的发展,依赖视觉感知等传感器的单车自动驾驶能力再次成为主流。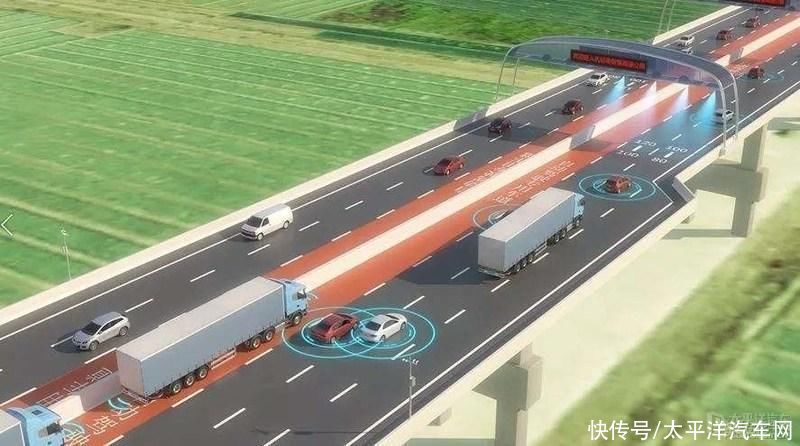
文章插图
对于未来,业界目前就发展单车能力还是包括车路协同的V2X技术路线存在着巨大的争议。
包括特斯拉等品牌,认为依赖车路自身视觉感知和不断升级的算法,便可以实现在任意环境的无人驾驶。特斯拉甚至不依赖激光雷达等感知硬件,认为仅依靠摄像头视觉感知为主,毫米波雷达为辅的硬件基础便能够实现无人驾驶。
而国内目前正大力发展车路协同的基础设施建设、智慧城市、高精度地图/定位等V2X路线,依托中国强大的基建能力,争取在V2X领域标准制定取得话语权。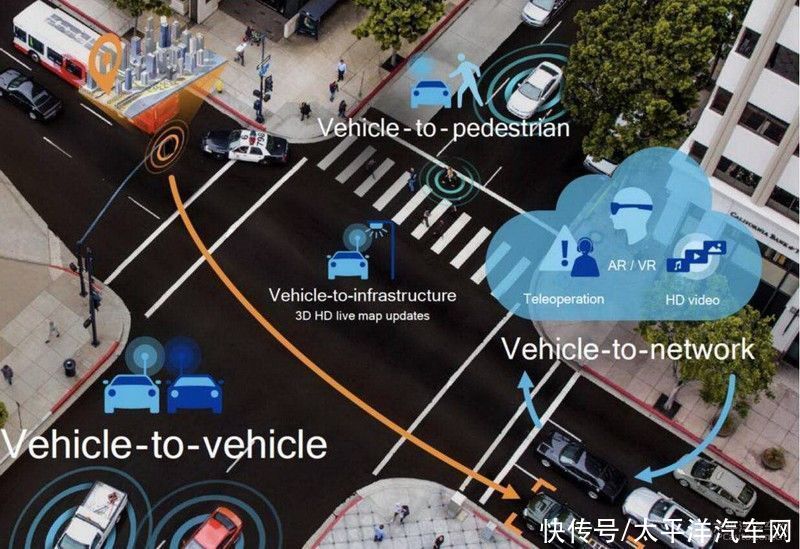
文章插图
在信息化高度发达的今天,万物互联已经成为了时代主流。单车自动驾驶能力固然十分重要,但车与外界的信息交流也是必不可少的,两者之间的权重还需要更多的实践加以证明,但包括V2V车与车(vehicle),V2I车与基础设施(vechile to infrainstructure),V2G车与电网(Vehicle-to-grid),V2P车与人(vehicle to people),V2N车与云(vehicle to network)的V2X技术能够更高效的解决未来出行的效率问题。
自动驾驶时代,私家车或许将成为用户购买私人空间的奢侈消费,而出行的需求可以更多的交给效率更高的无人驾驶车队,车的总量和利用率将大大提升。通过云端大数据、强人工智能的高效分配,堵车等问题或许将得到彻底的解决。
自动驾驶概念历经逾百年,我们或许第一次真正的看到了无人驾驶时代的曙光。
结语
不管是新能源还是智能汽车,我们正处在汽车产业百年变革的风口。今天我们看到的智能汽车或许还不够“智能”,以至于大家仍然会疑惑智能汽车究竟是什么。
或许就像在iPhone4问世之前,我们并没有觉得Java的诺基亚有何不妥,塞班系统就足够的智能了。但智能手机引领了移动互联网时代,今天手机能够实现的功能在当年完全不可想象。
基于多层卷积神经网络和深度学习而来的自动驾驶和语音控制在今天看来并没有太多的稀奇,但OTA让他们有了更多的可能。明天的智能汽车能干什么,我们在今天还很难预测,但不妨基于今天的技术打开想象,或许你也能创造一个新时代。
- 王文鉴|从工人到千亿掌门人,征服华为三星,只因他36年只坚持做一件事
- 精英|业务流程图怎么绘制?销售精英的经验之谈
- 走向|电商,从货架陈列走向内容驱动
- 权属|从数据悖论到权属确认,数据共享进路所在
- 高配版|从4599元跌至3699元,256GB+65W,12GB旗舰加速退场
- 科技|联咏科技将从明年下半年开始为iPad提供LCD驱动芯片
- 不确定性|从虾米看文娱,如何从内容不确定性寻找确定性?
- 换头像|从不换“头像”的人,多半都是这几张原因,你是哪一种?
- 添加|手机:小米手机如何添加门禁卡?
- 这场|这场顶级盛会,15位全球设计行业组织主席@烟台:中国创新经验从这里影响世界