百度背叛激光雷达路线了吗?( 六 )
 文章插图
文章插图
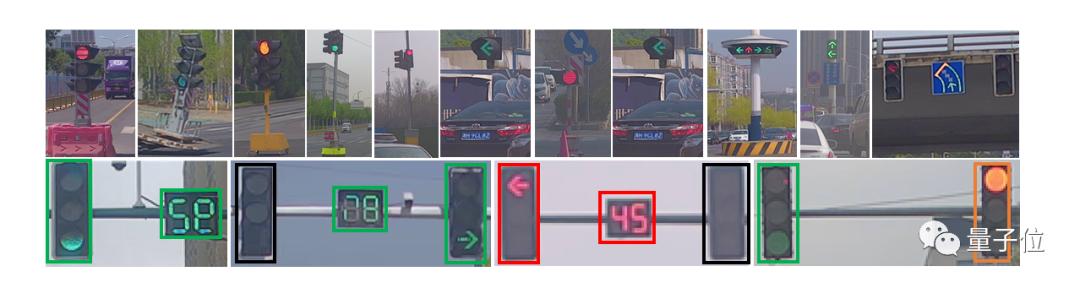
△红绿灯动态语义识别(移动红绿灯 , 多语义灯 , 故障灯等)可通行性推理 – 行驶在复杂城市道路中 , 交通信号灯在相机中全程可见难以获得保证 , 遮挡、逆光、雨雾模糊等情况下要求感知系统具备人类司机的推理逻辑 , 为此Apollo Lite感知补充了信号灯推理功能 。
 文章插图
文章插图
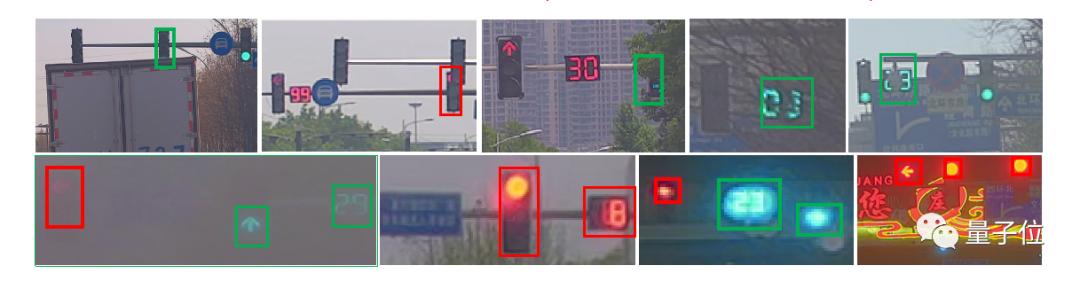
△红绿灯通行性推理场景(动静态遮挡 , 雾天/雨天/夜晚/背景干扰问题等)首先 , 增加算法对自身感知结果置信度的精准评估能力 , 在观测量不完全或者摄像头成像不理想情况下 , 切换到推理模式 。 该模式下算法结合车身周边障碍物运动信息提取车流轨迹 , 配合 对路口其它高置信可见灯的状态和语义分析 , 通过融合多路信息学习路口可通行性 , 预测灯色 , 有效保证了在观测数据不完整情况下信号灯颜色仍能被正确识别 。
得益于以上场景语义解读能力的升级 , Apollo Lite在城市道路的通行能力获得进一步提高 , 单位测试里程内 , 因信号灯被遮挡导致的主车急刹和不合理停滞等问题减少近3倍 , 因信号灯感知错误造成的路口通过失败问题减少近10倍 。
数据驱动的迭代模式数据闭环自动化是近年业内高频提及的概念 , “数据驱动算法”、“自动化解决问题”、“跨量级降低L4成本”等传播数据即能力的理念流传甚广 , 行业对数据的预期水涨船高 。
是否拥有了海量数据就等同于能自动迈进完全无人驾驶?一个靠数据驱动的系统如何打造?抛开技术理念与愿景 , 下面从「数据实践」和「数据组织能力建设」的角度跟读者分享百度在迈向「数据转化成驾驶能力」道路上的经验认知 。
回顾百度7年自动驾驶技术发展历程 , 我们将研发迭代模式定义成三阶段 , 每个阶段对应的场景 , 对人才结构和组织能力的需求不尽相同 。
 文章插图
文章插图
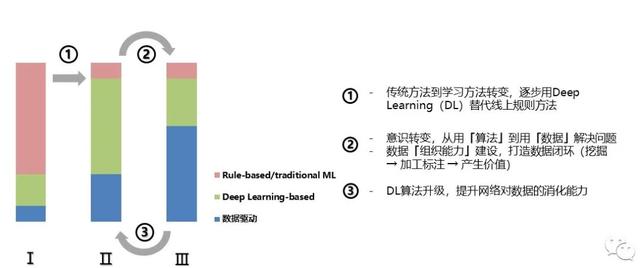
△研发模式迭代定义三阶段 , 从基于规则和传统机器学习方法逐步向数据驱动演进阶段Ⅰ – 此时数据基础设施建设相对薄弱 , 系统内Deep Learning化模块/功能占比较低 , 研发主力是已在某领域经过长期系统化训练的算法专家 , 他们用计算机语言将掌握的专业知识转化为功能性确定的代码 , 我们内部称这类初期算法「Rule-based」和「Traditional Machine Learning」方法 。
“Rule”中包含人为设定的规则和对物理世界的经验假设 , 以车道线检测任务为例 , 经典计算机视觉算法能够不依赖标注数据 , 仅使用梯度计算 , 边缘检测算子和曲线拟合等经典技术完成车道线提取 。
Rule-based方法优势是不依赖数据的积累标注 , 过拟合有限场景比较有效 , 算法从研发到上路速度快 , 适用于prototype演示阶段的研发迭代 。
另一方面 , 规则假设引入大量人工参数和判断条件 , 不利于业务需求增加测试规模扩大后的技术泛化以及场景拓展 。
Traditional Machine Learning方法如SVM和Random Forest等开始利用数据解决问题 , 这类方法对特征设计依赖强 , 研发人员需要具备对数据特征较强的直觉和洞察力 。
此外 , 它们的浅层模型结构对数据的消化能力有限 , 大数据在任务上存在过拟合 , 并不能很好的解决复杂的自动驾驶问题 。
阶段ⅠI – 这一阶段围绕数据所做的基础设施建设趋于完善 , 数据采集流程和标注规则明确 , 配套的数据标注工具和标注分发体系使用稳定 , 数据质量以及数据获取效率相比Ⅰ阶段有质的提升 。
此时研发人员有意识的用深度学习思想重新审视线上Rule-based和Traditional Machine Learning方法 , 积极尝试用神经网络(DNN)对旧方法进行改造替换 。
- 用户|2020互联网「年终盘点」之盘点:百度最泪目,趣头条接地气
- 2021年互联网巨头第一仗!飞书开撕微信,阿里华为百度全都入局
- 2020百度地图生态大会:开放平台十周年 为行业送出多个解决方案“大礼包”
- 一个人完成AI开发和部署 百度飞桨实现铁路货车车号精准检测
- 曝iPhone 13全系标配激光雷达扫描仪 真就十三香?
- 百度网盘主体公司发生变更,市值翻倍正值拆分上市好时机?
- 从工程师到“水果猎人”他在百度做科普
- 百度华为阿里领衔,聚焦最值得关注的十家人工智能公司
- 网课平台专项整治第三批问题网站平台曝光 涉新浪微博、百度贴吧
- 百度|百度输入法“AI助聊”功能使用指南来了!纠错、预测、帮写轻松搞定