工业机器人的Rv减速器和谐波减速器有什么区别
 文章插图
文章插图
作为工业机器人核心零部件的精密减速器 , 与通用减速器相比 , 机器人用减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点 。
【工业机器人的Rv减速器和谐波减速器有什么区别】大量应用在关节型机器人上的减速器主要有两类:
RV减速器和谐波减速器
1
RV减速器和谐波减速器的原理和优劣势
RV减速器:
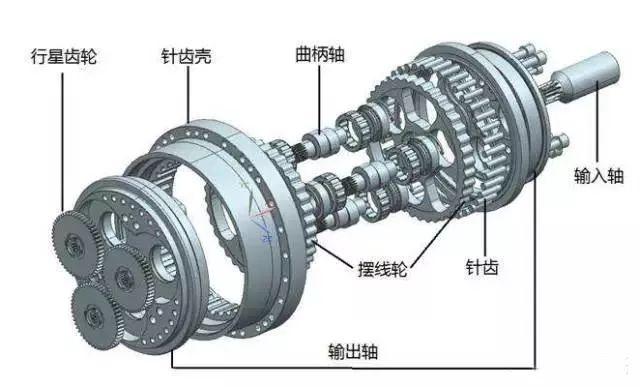
用于转矩大的机器人腿部腰部和肘部三个关节 , 负载大的工业机器人 , 一二三轴都是用RV 。 相比谐波减速机 , RV减速机的关键在于加工工艺和装配工艺 。 RV减速机具有更高的疲劳强度、刚度和寿命 , 不像谐波传动那样随着使用时间增长 , 运动精度会显著降低 , 其缺点是重量重 , 外形尺寸较大 。
 文章插图
文章插图
▲RV-E型减速器▲
谐波减速器:
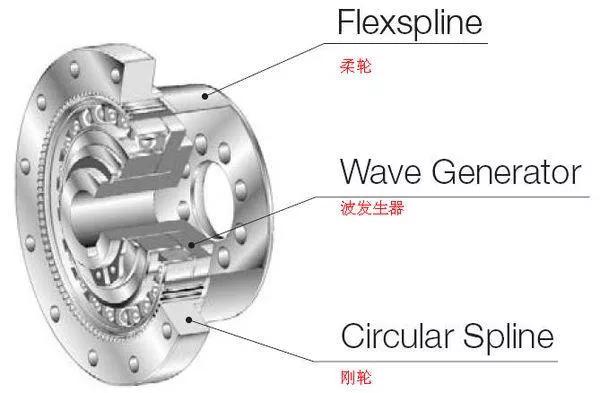
用于负载小的工业机器人或大型机器人末端几个轴 , 谐波减速器是谐波传动装置的一种 , 谐波传动装置包括谐波加速器和谐波减速器 。 谐波减速器主要包括:刚轮、柔轮、轴承和波发生器三者 , 四者缺一不可 。 其中 , 刚轮的齿数略大于柔轮的齿数 。 谐波减速机用于小型机器人特点是体积小、重量轻、承载能力大、运动精度高 , 单级传动比大 。
 文章插图
文章插图
▲谐波减速器▲
两者都是少齿差啮合 , 不同的是谐波里的一种关键齿轮是柔性的 , 它需要反复的高速变形 , 所以它比较脆弱 , 承载力和寿命都有限 。 RV通常是用摆线针轮 , 谐波以前都是用渐开线齿形 , 现在有部分厂家使用了双圆弧齿形 , 这种齿形比渐开线先进很多 。
减速器的两巨头是Nabtesco和Hamonica Drive , 他们几乎垄断了全球的机器人用减速器 。 这两种减速器都是微米级的加工精度 , 光这一条在量产阶段可靠性高就很难了 , 更别说几千转的高速运转 , 而且还要高寿命 。
谐波减速器由“柔轮、波发生器、刚轮、轴承”这四个基本部件构成 。
柔轮的外径略小于刚轮的内径 , 通常柔轮比刚轮少2个齿 。 波发生器的椭圆型形状决定了柔轮和刚轮的齿接触点分布在介于椭圆中心的两个对立面 。 波发生器转动的过程中 , 柔轮和刚轮齿接触部分开始啮合 。 波发生器每正时针旋转180° , 柔轮就相当于刚轮逆时针旋转1个齿数差 。 在180°对称的两处 , 全部齿数的30%以上同时啮合 , 这也造就了其高转矩传送 。
相比谐波减速器 , RV传动是新兴起的一种传动 , 它是在传统针摆行星传动的基础上发展出来的 , 不仅克服了一般针摆传动的缺点 , 还具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点 。
 文章插图
文章插图
RV减速器是由摆线针轮和行星支架组成 , 以其体积小、抗冲击力强、扭矩大、定位精度高、振动小、减速比大等诸多优点被广泛应用于工业机器人、机床、医疗检测设备、卫星接收系统等领域 。
RV减速器的壳体和摆线针轮是通过实体的钢来发生传动的 , 因此承载能力强 。 而谐波减速器的柔轮可不断发生变形来传递扭矩 , 这一点决定了谐波减速器承受大扭矩和冲击载荷的能力有限 , 因此一般运用在前端 。
2
RV减速器和谐波减速器两者的优劣势
- 谐波减速器结构简单紧凑 , 适合于小型化、低、中载荷的应用 。
- RV减速器刚性好、抗冲击能力强、传动平稳、精度高 , 适合中、重载荷的应用 , 但RV减速器需要传递很大的扭矩 , 承受很大的过载冲击 , 保证预期的工作寿命 , 因而在设计上使用了相对复杂的过定位结构 , 制造工艺和成本控制难度较大 。 RV减速器内部没有弹性形变的受力元件 , 所以能够承受一定扭矩 。 RV减速器的轴承是其薄弱环节 , 受力时很容易突破轴承受力极限而导致轴承异常磨损或破裂 。 在高速运转时这个问题更突出 , 所以RV减速机的额定扭矩随输入转速下降非常明显 。
- 大众展示EV公共充电新解决方案:移动充电机器人
- 普渡机器人获最佳商用服务机器人奖
- 翻译|机器翻译能达60个语种3000个方向,近日又夺全球五冠,这家牛企是谁?
- Google AI建立了一个能够分析烘焙食谱的机器学习模型
- 我国首次给四个新职业定标
- Clearbot:一款能自动在水上追踪收集垃圾的机器人
- 虾米音乐宣布2月5日关停 一代人的音乐回忆落幕
- 机器人|万州区举办“中国梦科技梦”机器人编程大赛
- “女性机器人”为啥火?外表颜值高、功能强,内部结构也一清二楚
- “机器人妻子”上市遭抢购,是在解决刚需,还是在挑战伦理?