MotoSimEG-VRC软件:安川机器人弧焊焊接离线编程( 二 )
零件焊接路径特征选取在CAM Job Management对话框中 , 点击“Add/Edit”按钮之后弹出Create job对话框 。 Path List功能区域下依次选择“Pick Edge”、“Process as one edge”选项 , 然后按住“Ctrl”键之后在软件工作区中依次点选零件模型上的弧焊焊接路径几何特征 , 选择完成后被选择的路径特征变为黄色指向线 , 与之相交的平面变为蓝色 。 其中 , 黄色指向线为机器人运行轨迹线 , 蓝色平面为机器人TCP坐标的参考平面 。
当然 , 零件焊接路径如果只有一条线段 , 那么就无需按住“Ctrl”键 , 直接使用鼠标点选路径特征线即可 。
Pick Edge:选择后激活选取零件弧焊焊接路径特征功能 。
【MotoSimEG-VRC软件:安川机器人弧焊焊接离线编程】Process as one edge:选择后可以将多个焊接路径特征合并为一个焊接路径特征 , 即将多条机器人运行轨迹线段合并为一条完整的运行轨迹线段 。
Alternate Face:切换机器人示教点TCP坐标的参考平面 。
Alternate Edge:当有多个轨迹特征时 , 用于切换已选取的边缘特征 。
 文章插图
文章插图
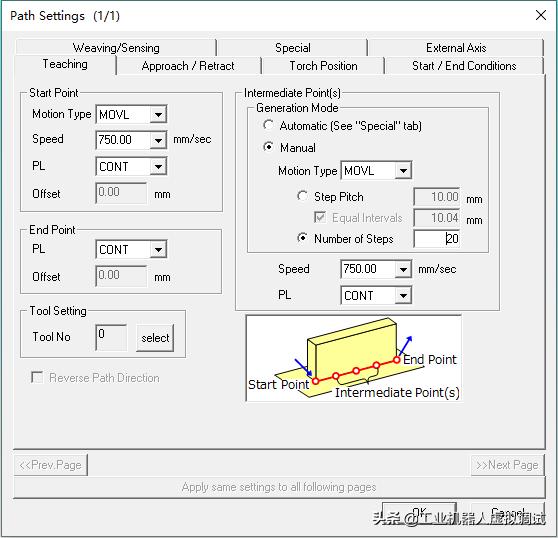
生成路径程序参数设置机器人运行路径特征选取完成之后 , 在Create job对话框中点击“Create Path”按钮 , 弹出Path Settings对话框 , 在此对话框中可以设置生成机器人运行路径轨迹的程序参数 。 同时 , 软件工作区焊接零件模型上选取的机器人焊接路径轨迹上出现一个“1” , 表示选取的三段路径轨迹合并为一条路径轨迹 。
Teaching选项卡用于设置自动生成机器人示教程序的运动参数 。 其中 , Start Point与End Point功能区设置机器人焊接起始点与结束点运动程序生成参数 , 包含插补类型Motion Type、运动速度Speed、定位精度PL等;Tool Setting功能区设置机器人末端工具编号;Intermediate Point(s)功能区设置机器人整体运行路径轨迹上的过渡点参数 , 生成方式(Generation Mode)包含自动生成Automatic、手动生成Manual两种 , 自动生成的相关参数可以在Special选项卡中查看与设置 , 手动生成参数中可以设置过渡点的插补类型、过渡点生成形式(按距离形式Step Pitch或按个数Number of Steps)以及过渡点的运动速度、定位精度 。
 文章插图
文章插图
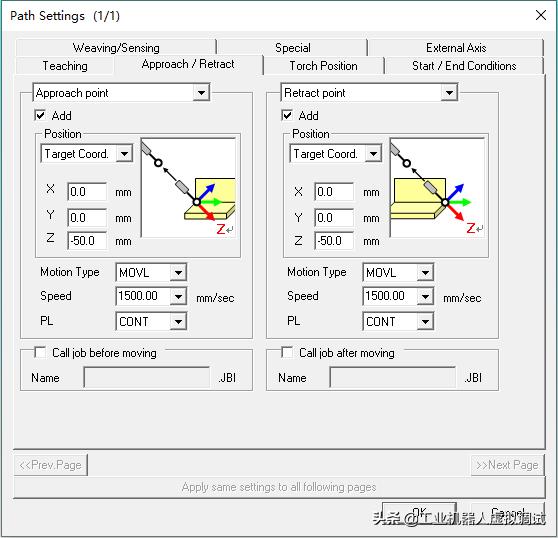
Approach/Retract选项卡用于设置机器人焊接路径起始点的接近点与结束点的离开点的运动参数 。 对于机器人弧焊焊接应用程序 , 一般都需要添加接近点与离开点 。 接近点功能区与离开点功能区分别选中“Add”之后 , 其下方的参数设置选项被激活 。
在Position功能区域下分别选择“Target Coord.” , 即以机器人弧焊焊接路径的起始点与结束点坐标系作为创建接近点与离开点的参考坐标系 。 然后在其下的X、Y、Z坐标值输入框中输入要平移的增量数值 , 并修改机器人程序的插补类型、运动速度、定位精度等参数 。
 文章插图
文章插图
Torch Position选项卡用于设置机器人焊枪姿态参数 , 此选项卡只有在选择弧焊焊接工艺应用(Arc Weld)时才会显示 。
Joint Orientation:指定要焊接的接头形状 , 有V形(V-Shape)与L形(L-Shape)两种可选 。
Work Angle:设置焊枪与参考平面之间的角度值 。
Travel Angle:设置焊枪与垂直于焊缝的平面之间的角度值 。
Rotation Angle:设置焊枪自身的旋转角度值 。
Joint Offset:Vertical用于设置焊枪与焊接工艺点之间垂直方向的平移量 , Horizontal用于设置焊枪与焊接工艺点之间水平方向的平移量 。
- Looking Glass推出由全息成像技术打造的3D照片软件
- 运动计数开发项目的对抗赛:飞算全自动软件工程平台碾压传统模式
- 每经18点丨美将禁止支付宝、微信支付等8个中国应用软件,外交部回应;铁路部门推出免费退票措施;违反居家隔离规定外出,大连3人被拘
- 别怪电池不耐用,这3类软件才是手机“耗电大户”,赶快告诉家人
- 戴尔新发布的商用显示器包含微软Teams软件专用按钮
- 网易数帆亮相中台战略大会,解读云原生软件生产力实践
- Windows 10端Chromium改善防病毒软件兼容性和深色模式
- LG Wing获得新的软件更新 一键发送应用程序更顺畅
- Windows 10等软件全部封杀 Flash彻底说再见
- 特斯拉软件更新暗示将支持Apple Music