MotoSimEG-VRC软件:安川机器人弧焊焊接离线编程
概述CAM Function是MotoSim EG-VRC软件实现安川机器人离线编程的核心功能 , 该功能通过在加工零件CAD模型上选取加工路径轨迹特征自动生成机器人加工工艺路径程序 。
CAM Function支持的加工工艺包括:弧焊焊接、激光焊接、激光切割、喷涂、抛光、去毛刺以及一般用途等 。
在MotoSim EG-VRC软件中使用CAM Function时 , 加工工件模型必须是外部导入的模型 , 使用软件自带的模型创建工具创建的模型 , 其几何特征不能被CAM功能选取 。
MotoSim EG-VRC软件支持导入几乎所有机械设计软件生成的特定格式的模型数据(如CATIA V5、PRO / E、Inventor、SolidWorks等) , 也支持导入IGES、STEP等中间格式的模型数据 。 但是在使用CAM Function时 , 要尽量使用机械设计软件原始格式模型数据 。 使用IGES、STEP等中间格式导入数据时 , 可能会出现无法检测到加工边缘特征的情况 。
除了单台机器人加工的离线编程外 , CAM Function还支持多台机器人联动运行加工 , 以及机器人与变位机、行走轴等外部轴的联动运行加工的离线编程 。
机器人弧焊焊接工作站创建首先创建一个简易弧焊焊接机器人工作站 , 在添加机器人控制器时 , 机器人的Application选项参数设置为“ARC” , 即弧焊焊接工艺应用 。
然后为机器人工作站添加简易工装 , 可以使用MotoSim EG-VRC软件自带的模型创建工具创建 , 也可以直接导入外部模型 。
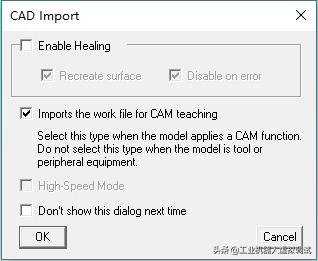
最后从外部导入焊接零件模型 , 导入时在CAD Import对话框中勾选“Imports the work file for CAM teaching”选项 , 这样导入模型的几何特征才能被选取 , 进而实现使用CAM功能进行离线编程 。
 文章插图
文章插图
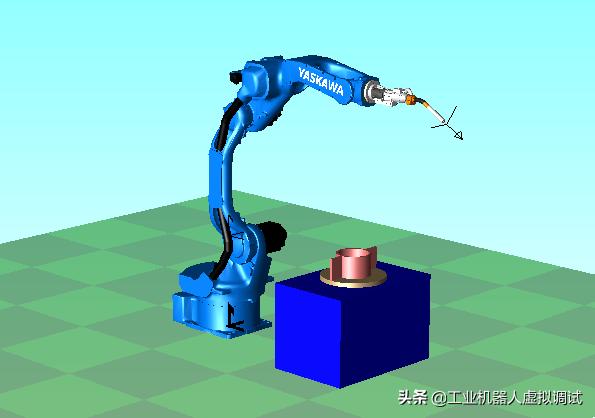
将机器人、简易工装、焊接零件进行合理布局 , 并在机器人上安装一把弧焊焊枪 , 全部完成后弧焊机器人虚拟仿真工作站如下图所示 。
 文章插图
文章插图
CAM Function使用流程MotoSim EG-VRC软件中CAM Function的使用大致可以分为四个步骤 , 即机器人示教程序创建、零件焊接路径特征选取、生成路径程序参数设置、生成路径程序测试与后处理 。
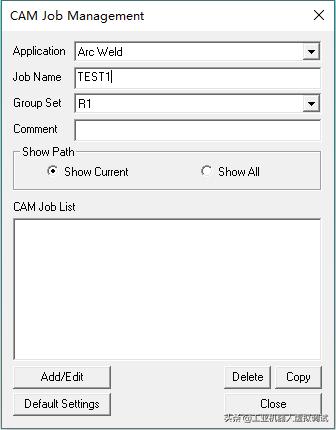
机器人示教程序创建机器人示教程序的创建是在CAM Job Management对话框中完成的 。 软件“Home”菜单栏中点击“CAM Function”命令按钮 , 弹出CAM Job Management对话框 。
Application:选择工艺应用 , 可选项包括弧焊焊接、激光焊接、激光切割、喷涂、抛光、去毛刺以及一般用途等 , 本例中选择弧焊焊接(Arc Weld) 。
Job Name:设置机器人程序名称 , 如TEST1 。
Group Set:当前创建的机器人程序包含的控制组 , R表示机器人本体控制组 , B、S分别代表机器人外部轴控制组 。 本例中没有外部轴控制组 , 因此只选择R1即可 。
Comment:机器人程序注释 , 本条目为可选项 。
Show Path:指定CAM Job List中机器人程序的显示模式 , 当选择“Show Current”时 , 仅显示当前机器人程序;当选择“Show All”时 , 将显示全部机器人程序 。
CAM Job List:使用CAM Function创建的机器人程序列表 。
参数全部设置完成后点击下方的“Add/Edit”按钮 , 可以进入下一步 , 即创建机器人路径轨迹 。 对于弧焊焊接工艺应用 , 若是第一次使用CAM Function , 则会弹出Please set the “Default Settings”.信息提示框 。 此时点击下方的“Default Settings”按钮 , 在弹出的Path Settings对话框中对生成路径参数进行配置 , 也可以直接点击“OK”按钮 , 在后续的生成路径参数配置步骤中进行参数配置 。
 文章插图
文章插图
- Looking Glass推出由全息成像技术打造的3D照片软件
- 运动计数开发项目的对抗赛:飞算全自动软件工程平台碾压传统模式
- 每经18点丨美将禁止支付宝、微信支付等8个中国应用软件,外交部回应;铁路部门推出免费退票措施;违反居家隔离规定外出,大连3人被拘
- 别怪电池不耐用,这3类软件才是手机“耗电大户”,赶快告诉家人
- 戴尔新发布的商用显示器包含微软Teams软件专用按钮
- 网易数帆亮相中台战略大会,解读云原生软件生产力实践
- Windows 10端Chromium改善防病毒软件兼容性和深色模式
- LG Wing获得新的软件更新 一键发送应用程序更顺畅
- Windows 10等软件全部封杀 Flash彻底说再见
- 特斯拉软件更新暗示将支持Apple Music