中国工程院院士李骏:单车智能存在5大问题,需要新技术路线( 二 )
在这样大的背景之下 , 中国的智能网联汽车如何发展?接下来我们重点讲下中国智能网联汽车如何突破 。
智能网联汽车发展需要新技术突破目前单车智能主要有两大类:
一类是以Waymo为主 , 就是以多线激光雷达为感知 , 我称之为饱和感知 , 这种饱和感知的最大优势就是它非常灵敏 , 其劣势是它对高精地图依赖性非常高 , 而且成本非常高 。
另一类是以特斯拉为代表 , 基于视觉感知(依赖摄像头) , 主要是运用大量的人工智能和数据学习 。
 文章插图
文章插图
 文章插图
文章插图
大家知道特斯拉的市值已经超过丰田成为世界第一大市值的汽车公司 。 这两类汽车路线都是只重视“使能”也就是汽车单车智能技术路线 。
目前国内大多数的自动驾驶公司都是在这两个技术路线里 , 那么有没有其他的技术路线?
 文章插图
文章插图
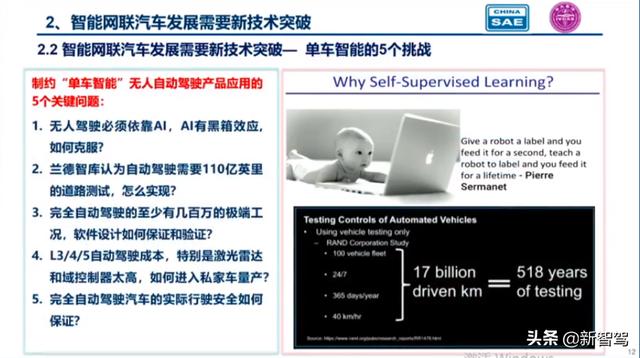
【中国工程院院士李骏:单车智能存在5大问题,需要新技术路线】我们看到目前单车智能存在五大弱点:
- 无人驾驶必须要依靠AI , AI有黑箱效应 , 如何克服?
- 兰德智库认为自动驾驶需要110亿英里的道路测试 , 怎么实现?
- 完全自动驾驶至少有几百万的极端工况 , 软件设计如何保证和验证?
- L3、L4、L5自动驾驶成本很高 , 特别是激光雷达和域控制器太高 , 如何进入私家车量产?
- 完全自动驾驶汽车的实际行驶安全如何保证?目前自动驾驶汽车伤亡事故正在增加 , 而且它的社会问题比电池热失控更大 。
 文章插图
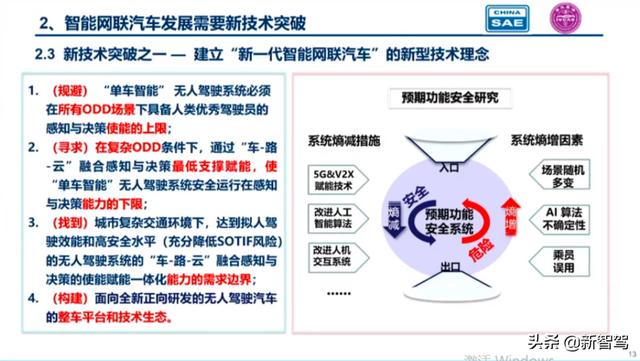
文章插图一是新型智能网联汽车理念 , 不能只是完全的单车智能 。 你要规避 , 单车智能总是在做自动驾驶的能力上限 , 能力上限是很难达到的 。
二是要寻求 , 单车不智能不行 , 但是要压到下限 。
三是要找到一个把车自己的自动驾驶能力和车外赋能联合在一起的边界 , 使得大家都便利 。
四是按照这个技术路线进行正向开发汽车下一代产品 , 这是一个完全新的产品 , 而不是说在现有车上搭载就行的 , 这个要吸取新能源的教训 , 我们总是在搭载 , 因此新的技术理念非常重要 。 未来是熵的概念 , 自动驾驶汽车总是在熵增 , 重点是如何做到熵减 。
 文章插图
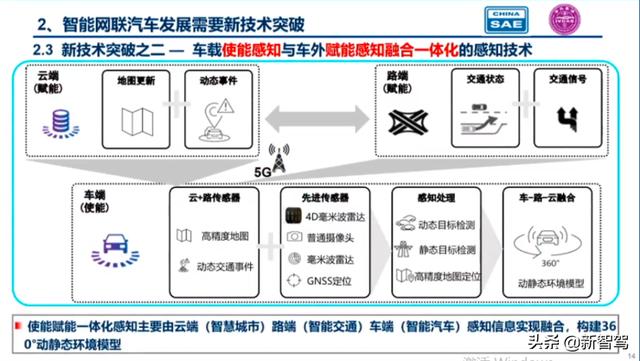
文章插图新技术突破之二是车载使能感知与车外赋能感知融合一体化的感知技术 。
 文章插图
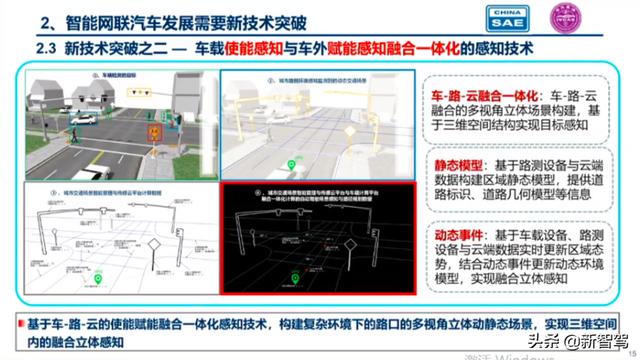
文章插图自动驾驶最难的就是过城市的十字路口 。 从上图中可以看到 , 过一个路口有一个场景 , 车内车外同时感觉到这个场景 , 然后同时数字化 , 把这个信息传递到汽车当中 , 让车载计算平台做最后的感知、规划、决策 , 这就叫使能、赋能融合一体化技术 , 目前还没有车可以做到这一点 。
 文章插图
文章插图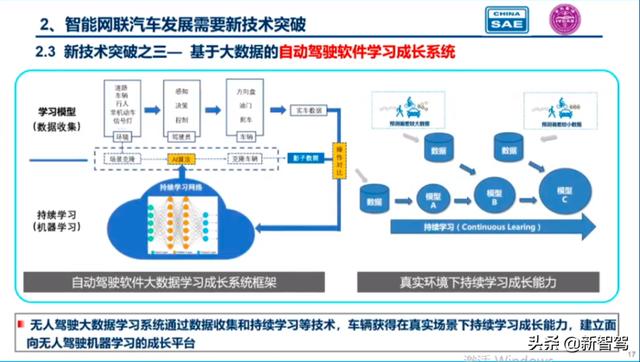 文章插图
文章插图三是要进行学习 。 我曾提过一个观点就是软件定义汽车 , 数据开发汽车 , 芯片制造汽车 。
没有数据是开发不了汽车的 , 过去传统汽车做汽车发动机标定也是要靠数据的 。 要建立这样一套自动驾驶软件学习成长系统 。 目前我们中国OEM、一级供应商在这方面值得反思的 。
- 中国移动良心了?10年不换号,老用户将享4大特权
- 虾米音乐,中国在线音乐发展的牺牲品?
- 苹果为中国用户发了款新品:AirPods Pro?年限量款
- 美媒:美国拉小弟搞开放网络规范摆脱华为 但更多中国公司加入竞争搅黄美方计划
- 苹果为中国用户发布牛年限量款AirPods Pro,售价人民币1999元
- 德国专家:中国这项顶尖科技尚未突破,还请你们不要盲目自嗨
- 华为连续三大动作,开始全面自救,比尔盖茨:中国芯破冰指日可待
- 1999元!苹果推出中国专属AirPods Pro,在耳机盒上印了个牛年标志
- 为何日本实体店能“干倒”电商,中国实体店却不行?原因值得深思
- 搬起石头砸自己脚!日本这项技术封锁中国,如今舔着脸求我们教他