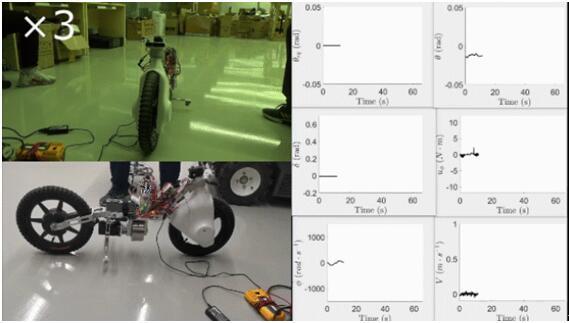
此外 , 实验室还在自建平台上证明了新控制器效果良好 , 能让机器人保持自平衡 , 并有一定的抗外界干扰能力 。
 文章插图
文章插图
而在另一项研究《自平衡轮式移动机器人平衡的增益规划控制器设计》中 , 不同于传统方法将静态和动态平衡区分对待 , 研究团队建立了可以同时描述轮式移动机器人动态特性和静态特性的统一的数学模型 。
 文章插图
文章插图
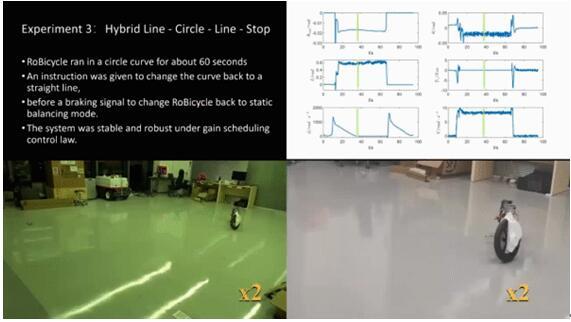
基于同一个模型 , 动态平衡和静态平衡对不同驱动输入的依赖程度不同 , 无法使用同样的控制参数 。 因此 , 研究团队使用基于增益规划(Gain Scheduling)的控制方法 。 该控制方法可在两种情况下都保持轮式机器人的平衡 , 这一点在理论和实验中都得到证明 。
 文章插图
文章插图
移动机器人的技术框架
腾讯 Robotics X 实验室主攻机器人移动、灵巧操作和智能体等三大核心通用技术的研究与应用 。
其中 , 移动是机器人最基础的能力之一 , 此次发布的两项进展就属于移动方向 。
而移动方向又可分为四个技术模块:机械设计、感知、运动规划与控制、整机系统设计与搭建 。 通俗的说 , 前三者分别是机器人的躯干、眼睛和大脑 , 最后一项则是它的各“器官”协调的能力 。
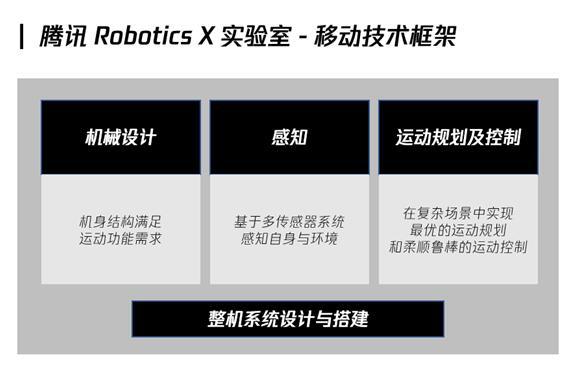 文章插图
文章插图
算法自研的 Jamoca 正是结合了腾讯在感知、运动规划与控制两方面的研究成果 。 而整机自研的自平衡轮式移动机器人则可以视作腾讯在机器人的机械设计和整机系统设计与搭建方向能力上的一个里程碑项目 。
腾讯 Robotics X 与腾讯 AI Lab 实验室主任张正友博士表示:“移动或运动能力 , 是机器人最核心、也是最基本的能力之一 , 决定了它能去到什么场景 , 做什么事情 , 未来有什么样的想象力 。 我们很高兴能看到这两项进展 , 并将继续深入探索机器人的通用能力 , 为虚拟到真实世界搭建一个有力的桥梁 。 ”
- 大众展示EV公共充电新解决方案:移动充电机器人
- 普渡机器人获最佳商用服务机器人奖
- 翻译|机器翻译能达60个语种3000个方向,近日又夺全球五冠,这家牛企是谁?
- Google AI建立了一个能够分析烘焙食谱的机器学习模型
- 我国首次给四个新职业定标
- Clearbot:一款能自动在水上追踪收集垃圾的机器人
- 机器人|万州区举办“中国梦科技梦”机器人编程大赛
- “女性机器人”为啥火?外表颜值高、功能强,内部结构也一清二楚
- “机器人妻子”上市遭抢购,是在解决刚需,还是在挑战伦理?
- 田伟院士:我眼中的医疗机器人