同时 , 基于实时的本体状态估计 , Jamoca能够结合质心动力学模型来构建优化问题 , 实时求解机器人足端所需的地面反作用力 , 并结合反馈控制实现精准鲁棒的实时力控 , 可完成行走、对角小跑以及跳跃等的运动控制 。
 文章插图
文章插图
不同于预先设计好规则之后做重复的运动的工业机器人 , Robotics X 实验室更关注机器人有意识、有判断的自主特性研究 , 目的就是要在有很大不确定性的动态环境里 , 能够实现机器人的自主判断、自主决策 , 并自主完成任务 。
 文章插图
文章插图
现阶段 , Jamoca 主要用于实验室内部科研实验 。 它的在线环境感知、最优运动规划和实时运动控制等能力 , 未来将帮助腾讯其他机器人产品更好地适应复杂的现实环境 。
 文章插图
文章插图
静止、行进均能自主保持平衡的轮式机器人
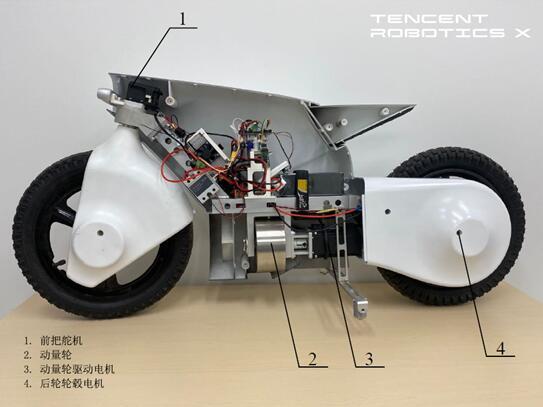
此次一同亮相的 , 还有一款自平衡轮式移动机器人 , 也可称之为自平衡自行车 , 是腾讯 Robotics X实验室的首个整机自研机器人 。
它在传统轮式移动机器人的基础上 , 增加了动量轮及其电机驱动系统 , 使得机器人可以在静止及行进状态下均保持平衡不倒 。
 文章插图
文章插图
自平衡轮式移动机器人的硬件平台完全由腾讯Robotics X自研 , 重约15公斤 , 长1.15米 , 高0.52米
它的控制能力又可以细分为行进中的动态自平衡和停止行进时的静态自平衡 。 行进中的动态自平衡是依靠前把转动进而带动车身的转动实现 , 而停止行进时的静态自平衡则采用动量轮力矩平衡技术 , 应用角动量守恒的原理实现自平衡控制 。
 文章插图
文章插图
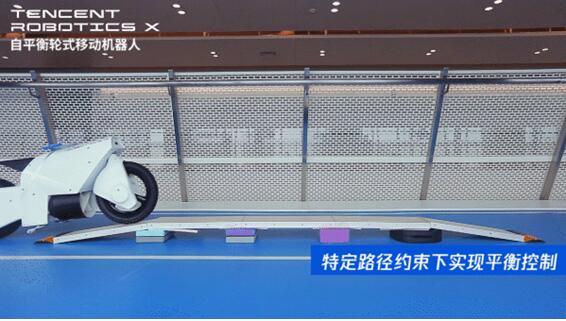
依靠平衡算法 , 即使受到一定的外界干扰 , 腾讯自平衡轮式移动机器人仍然可以在保持自平衡状态的同时 , 实现平稳地向前行驶 。
 文章插图
文章插图
【机器人|机器狗走梅花桩?自行车能自平衡?腾讯 Robotics X 实验室研究首次“开箱”】机器人在不同的路面状况下 , 例如遇到上下坡时 , 也都表现出了较好的运动能力和平衡性能 。 甚至对于行驶路径上存在特定约束的情况 , 比如沿着独木桥行驶的场景 , 它也能从容应对 。
 文章插图
文章插图
在此前举行的机器人行业国际顶会IROS2020上 , 腾讯 Robotics X 实验室发布的两篇平衡控制方向的Oral论文 , 就来自于该机器人项目 。
IROS由IEEE(电气和电子工程师协会)和RSJ(日本机器人学会)共同举办 , 是机器人领域三大国际顶级会议之一 , 今年的主题为Consumer Robots and Our Future , 接收来自机器人与人工智能、机器人视觉、传感器、云机器人等相关领域的研究 。
在第一项研究《自平衡轮式移动机器人的非线性平衡控制:设计与实验》中 , 腾讯 Robotics X 实验室与纽约大学合作研究了自平衡轮式移动机器人的动静态平衡控制的稳定性问题 。
 文章插图
文章插图
在传统轮式移动机器人的基础上 , 腾讯Robotics X 实验室增加了动量轮和电机驱动系统 , 使用了级联与阻尼配置的无源控制(Interconnectionand Damping Assignment - Passivity Based Control, IDA-PBC)方法 , 并应用李雅普诺夫理论从理论上证明了自平衡轮式移动机器人的闭环系统稳定性 。
- 大众展示EV公共充电新解决方案:移动充电机器人
- 普渡机器人获最佳商用服务机器人奖
- 翻译|机器翻译能达60个语种3000个方向,近日又夺全球五冠,这家牛企是谁?
- Google AI建立了一个能够分析烘焙食谱的机器学习模型
- 我国首次给四个新职业定标
- Clearbot:一款能自动在水上追踪收集垃圾的机器人
- 机器人|万州区举办“中国梦科技梦”机器人编程大赛
- “女性机器人”为啥火?外表颜值高、功能强,内部结构也一清二楚
- “机器人妻子”上市遭抢购,是在解决刚需,还是在挑战伦理?
- 田伟院士:我眼中的医疗机器人