文章图片
文章图片
文章图片
【小行星|比日本隼鸟2号先进,我国小行星取样方案曝光,四条机械臂可爬行】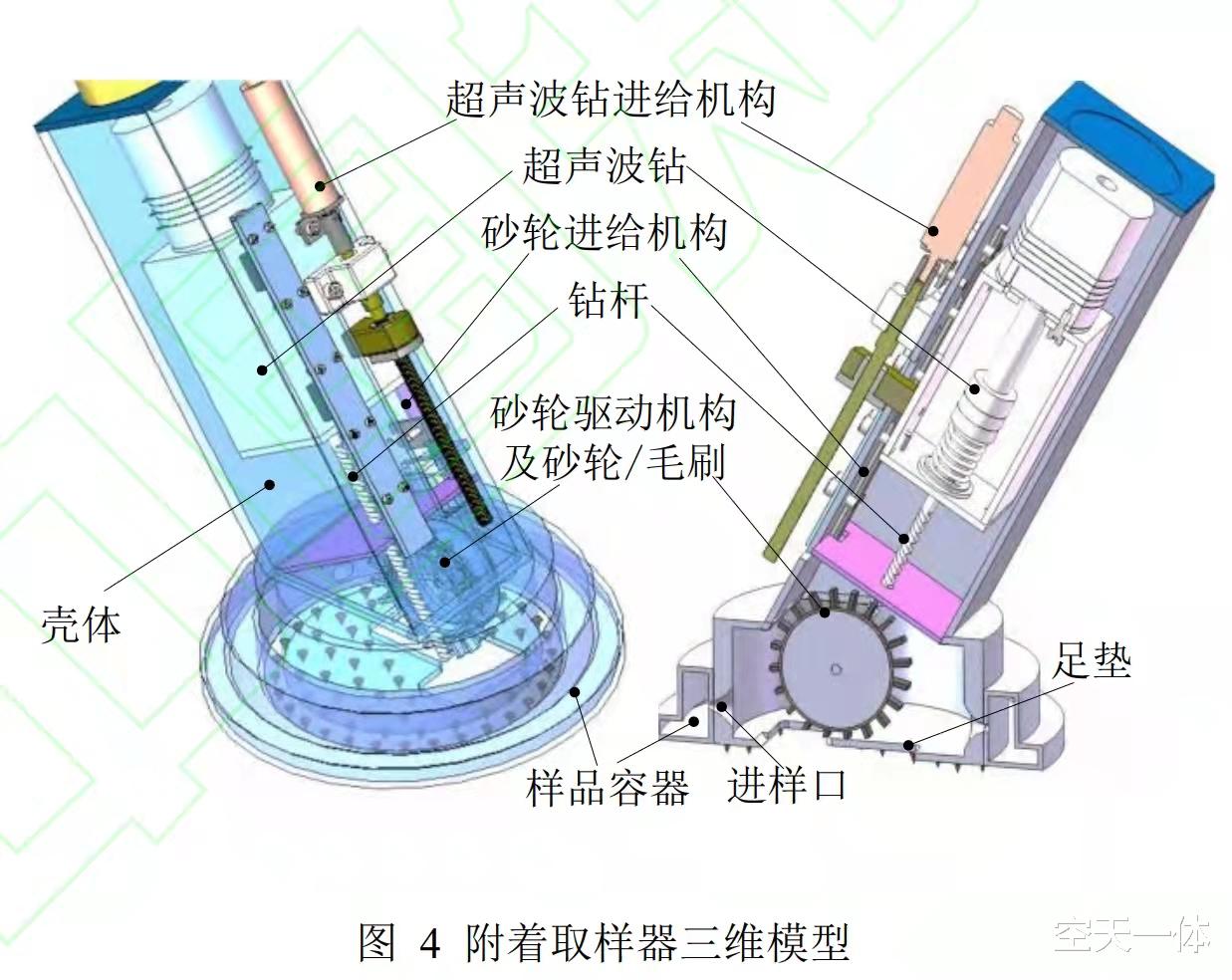
文章图片

文章图片
文章图片
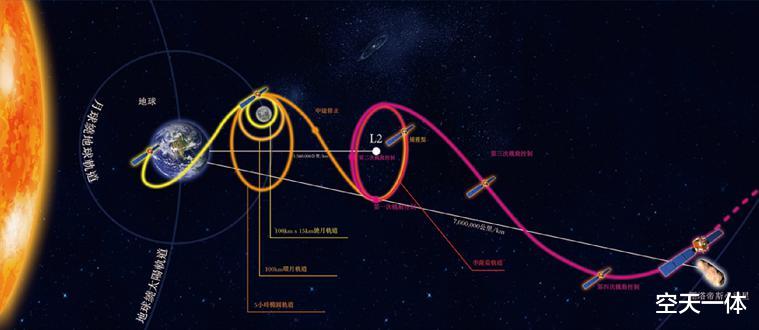
近几年来 , 我国航天在月球采样返回、登陆火星等方面取得了有目共睹的成绩 , 同时也没忘记小行星探测 , 比如2010年发射的嫦娥二号 , 在完成对月球的探测任务之后 , 又飞向深空 , 完成了太阳风粒子探测、拉格朗日点L2任务 , 甚至对一颗形似花生的4179号小行星进行了近距离的观测 , 并预计将在2029年重回地球附近 。
嫦娥二号顺带飞行这么远
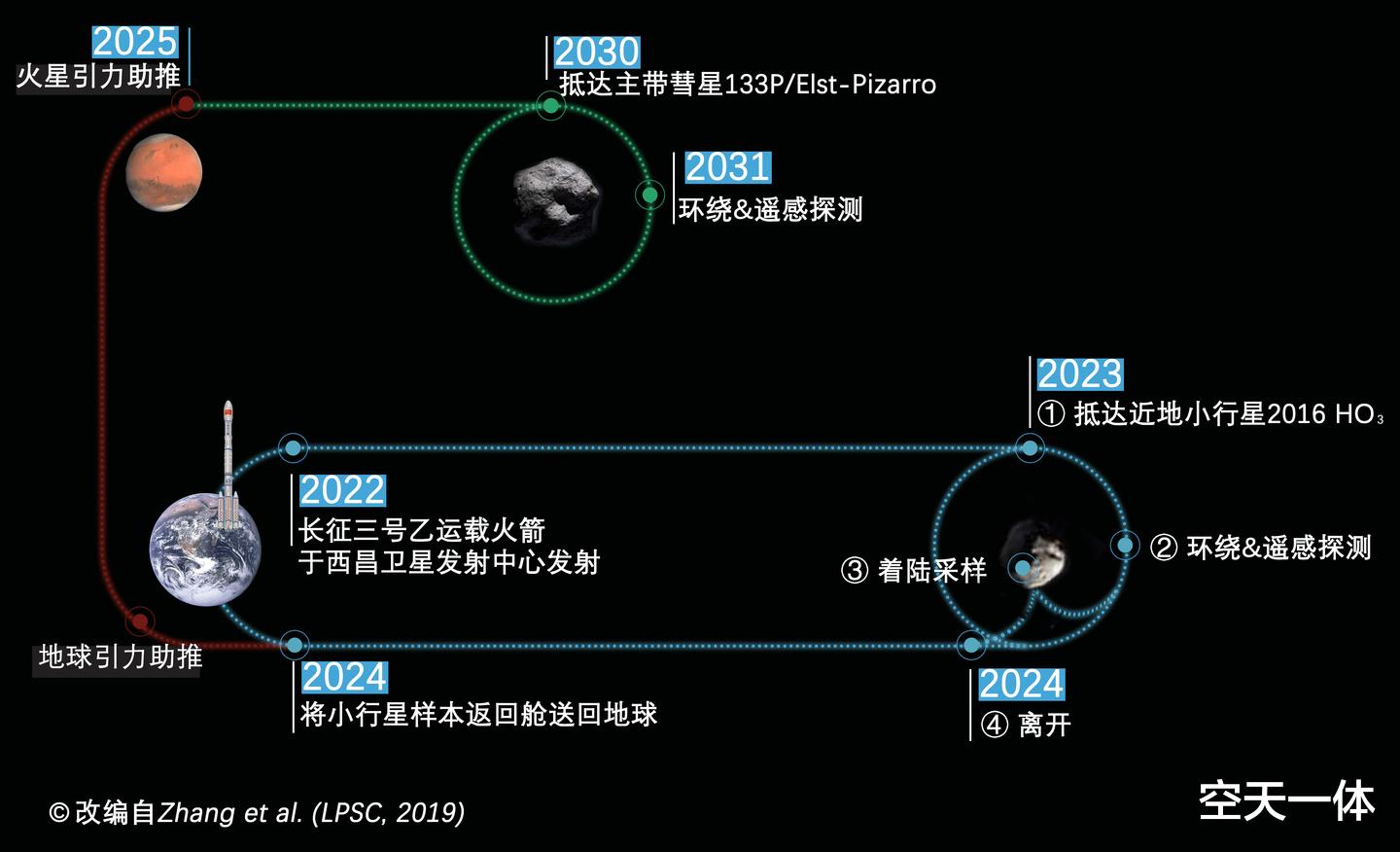
当然 , 嫦娥二号的小行星探测只是附带的额外任务 , 与日本“隼鸟”号、“隼鸟”2号等专门探测小行星的探测器还是无法相提并论的 。 不过 , 在2025年左右 , 我国将实现近地小行星取样返回和主带彗星环绕探测任务 , 算上飞行的时间 , 我国的小行星探测器预计会在2022年发射 。
我国在2023年就会发射专门的小行星探测器
而据中国科学院院士叶培建透露 , 目前我国的小天体探测任务已经进入工程研制阶段 。 而咱们的小行星探测器可比日本的“隼鸟”2号先进多了 , 从已经曝光的部分方案来看 , 这一点也不夸张 。
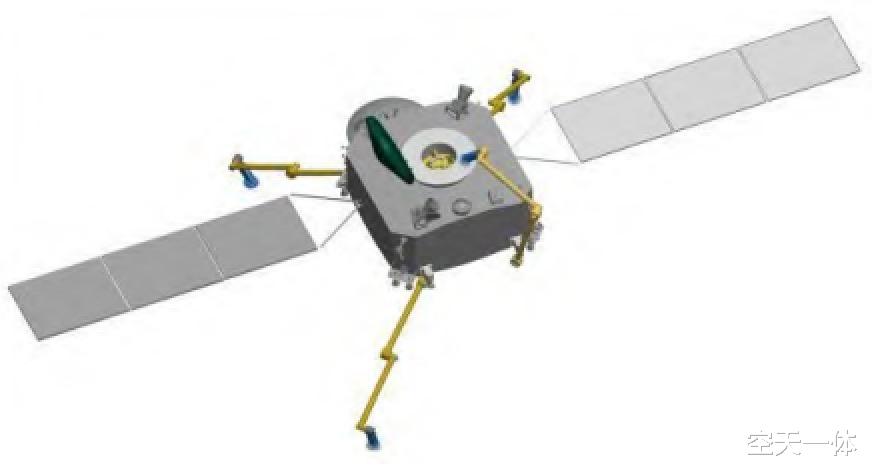
我国小行星探测器大概长这样
首先 , 日本“隼鸟”2号所谓的登陆小行星 , 其实是用一条“腿”和“龙宫”号触碰一下 , 而咱们的小行星探测器是用4条机械臂紧紧抓住小行星 , 而且还利用超声波钻进机构在星表打孔 , 形成机械固态连接 , 也就是说机械臂要钻进小行星的“肉”里 , 牢牢地抓住 。
它有4条机械臂
不仅如此 , 这4条机械臂还可以通过步态协调和附着取样器的多次附着固定 , 带着整个探测器在小行星表面爬行 , 你可以将它理解为一只“太空蜘蛛”或者“太空螃蟹” 。 而日本的“隼鸟”2号则是通过“空投”一辆“小行星地表探测车” , 来实现小行星表面的爬行 。 嗯 , 这个车和婴儿手上拿的玩具车差不多大吧 。
看来咱们对太空蜘蛛独有情钟
日本的“小行星地表探测车”
其次 , 我们的探测器在小行星上的采样 , 是通过附着取样器深深钻进小行星的“体内” , 然后通过一整套类似超声波电钻、砂轮、毛刷来采集样品 , 无论是硬质岩石 , 还是风化层均可拿下 , 小编形象地将它称为“扫地机器人” 。 而“隼鸟”2号的采样是先向小行星发射一颗子弹 , 溅起星尘 , 然后探测器通过飞掠星尘的方式 , 取得样品 , 目标只有100毫克 , 也就是0.1克 , 所以当最终采到5.1克样品时 , 整个日本都要高兴坏了 , 而咱们的目标是采集到以千克为计量单位的样品 。
咱们的太空扫地机器人设计
隼鸟二号发射的子弹
第三 , 前面我们说“隼鸟”2号“登陆”小行星 , 其实就是用一条腿和“龙宫”触碰一下 , 大概相当于航天器的交会对接 , 只是距离地球远了一些 , 大概在52亿公里之外 , 探测器本身的质量也只有500公斤左右 , 其难度远远无法和我们将8.2吨的嫦娥五号发射到月球上 , 然后再成功返回相提并论的 , 毕竟月球是有引力的 , 而“龙宫”小行星的引力几乎为零 。
隼鸟二号触碰龙宫小行星真实画面
隼鸟2号“登陆”想象图
说到这个引力 , 咱们数吨重的小行星探测器还专门在顶部设计了一个发动机 , 在着陆后点燃 , 将探测器紧紧地压在小行星表面 , 防止飘走了 。 而在小行星表面完成取样 , 爬行之后 , 探测器主体又可以起飞 , 将返回舱带回地球附近发射回来 , 然后又去探测主带彗星 , 整个行程也是数十亿公里 。
- 量子计算机|我国已经实现“量子霸权”?比起超级计算机,速度快100万亿倍
- 登月|阿姆斯特朗勘探地下洞穴时,比登月还激动,因为发现了黄金天书?
- 显卡|IQOO Z5和红米note10 Pro对比:同为LCD屏你会选谁?
- 红米手机|5000mAh+90Hz高刷+128G储存,现在仅售1199元,性价比太高
- iphone12|它是4000左右性价比最高的iPhone之一,买它不后悔!
- 魅族|从3999降至2499,8+256GB、三星定制屏,魅族也有高性价比
- iPhone|内行人认同的智能手机,目前这4款机型最值得买,一款比一款猛!
- 免疫系统|新冠最新毒株!比德尔塔还厉害,疫苗还管用吗?
- 小行星|达安科普:等温扩增和荧光定量PCR在新冠核酸快速检测中的应用
- 红米手机|性能比麒麟990还强!5000mAh+67W,8+256G卖1899