文章插图
图|机器人手指的结构(来源:Nature Communications)
在实际应用中,它是通过解决电路板布局和布线问题来构建的,确保了电子设备的紧凑性。所有电机都集成在手掌中,有五个手指和指尖传感器,可以通过简单的连接配置轻松地连接到一般机器人手臂上。
在实验中,这个全新的机器手能抓取各种形状物体的可能性,提供强大的抓取力,并确保抓取时的精细度。最后,通过使用剪刀剪纸和用镊子拾取小物件的试验,验证了手的高利用率,复制了日常生活中人手执行的工具操作。
文章插图
图|ILDA 机器手灵活抓握能力(来源:Nature Communications)
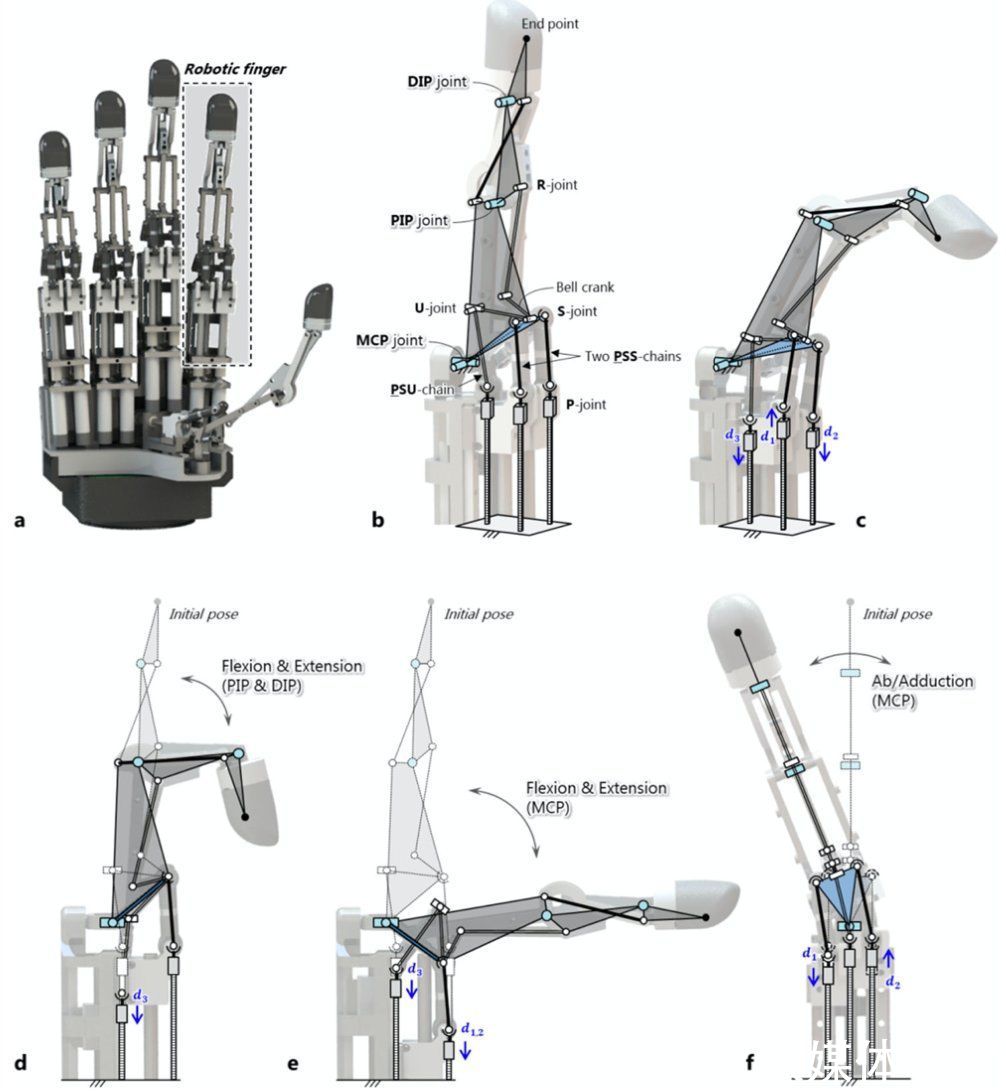
性能再上新台阶研究人员对 ILDA 机器手性能进行了一些分析。在连杆驱动机构方面,设计的关键在于实现一个连杆驱动的机器人手指机构,该机构具有类似人类手指的 3 自由度运动,具有窄手指大小的工作空间,以确保机器人手的灵巧性。
大多数连杆驱动的机器人手指只实现了两个关节从属的 1 或 2 自由度运动,通过三个棱柱关节处的线性位移,研究人员开发了手指3自由度运动的组合,通过旋转电机和滚珠丝杠的组合产生三个线性位移,三个电机可以同时产生三自由度运动并产生高力输出。
文章插图
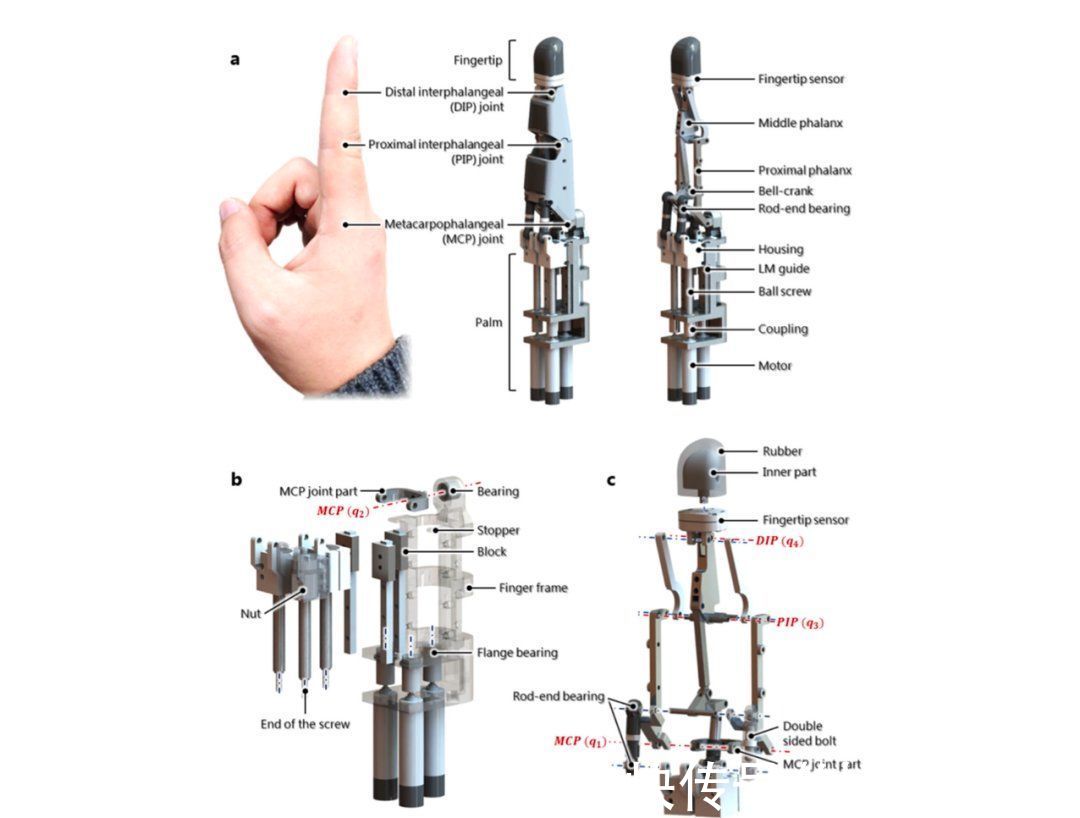
图|机器手指机构的运动学结构(来源:Nature Communications)
为实现所设定的目标需求,研究人员主要考虑以下因素:(1)选择和配置合适尺寸的零件以实现所需的自由度运动:在手指形状的狭窄空间中实现上述运动学模型的功能,应在模型的配置中适当安排。因此,从设计角度选择合适尺寸的小部件非常重要。(2) 高效的动力传输结构,最大限度地减少装配零件之间的摩擦。为了获得较高的指尖力,需要一个紧凑的结构,同时最小化动力传输部分的摩擦力。(3) 易于制造和组装。为了提高已开发机械手的市场渗透率,从成本和维护方面对其进行评估也很重要。因此,设计一种简单、鲁棒的机械手结构是非常重要的。
文章插图
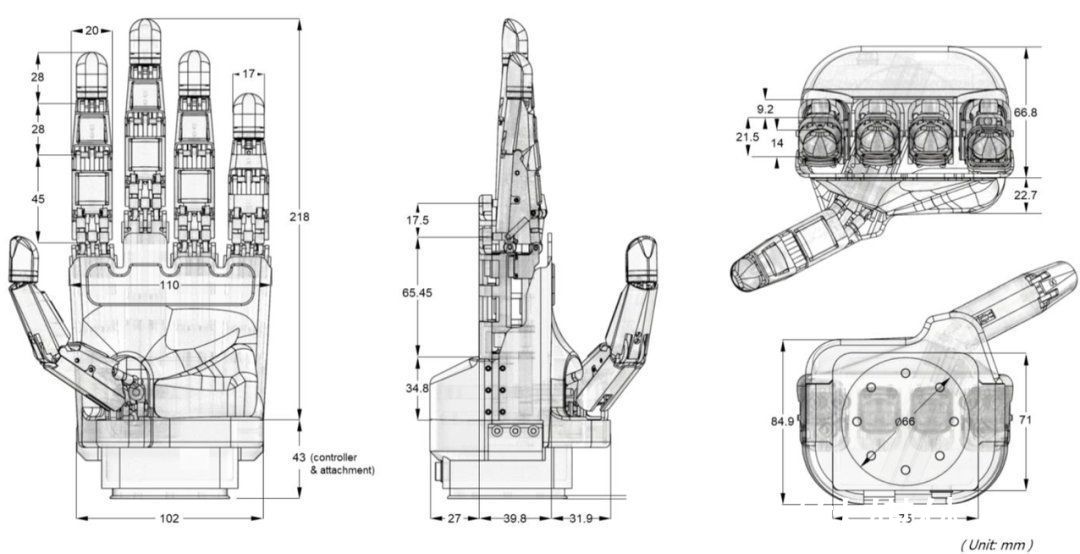
图|机器手的详细尺寸(来源:Nature Communications)
最后,所有动力传输部件和电机都集成到手的手掌侧,五个 F/T 传感器安装在配置的手指部件的每个指尖上,传感器接线已完成,因此不会干扰手指的移动,最终,开发出了这种最大长度为 218 mm、重量仅为 1.1 kg 的集成机器手。
为了验证 ILDA 手的性能,研究人员从三个维度进行了评估:(1)工作空间内的灵巧度;(2)指尖力;(3)触觉感知能力。
在实验中,MCP 接头可从 0° 驱动至 90°,PIP 接头也可从 0° 操作至 90°;此外,PIP 接头可以独立于 MCP 接头运行,手指外展和内收的角度为 ±35°。
文章插图
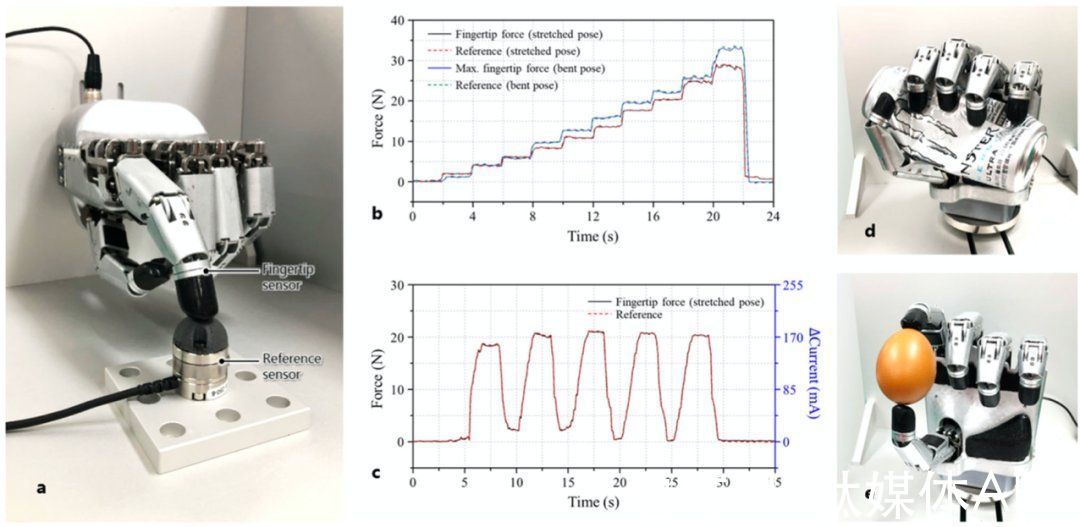
图|性能分析(来源:Nature Communications)
通过指尖传感器确定接触点处接触力的大小,并将相同的力施加到指尖和参考传感器上,手指施加的力依次递增,而 25 mA 电流每 2 秒递增一次,这个手指施加的最大力在伸展姿势为 28 N,弯曲姿势为 34 N,验证了手指施加的静态力的准确性,平均误差为 0.9 N。响应通常匹配良好,无临界误差,在执行精细任务时具有实现力控制的巨大潜力。

文章插图
文章插图
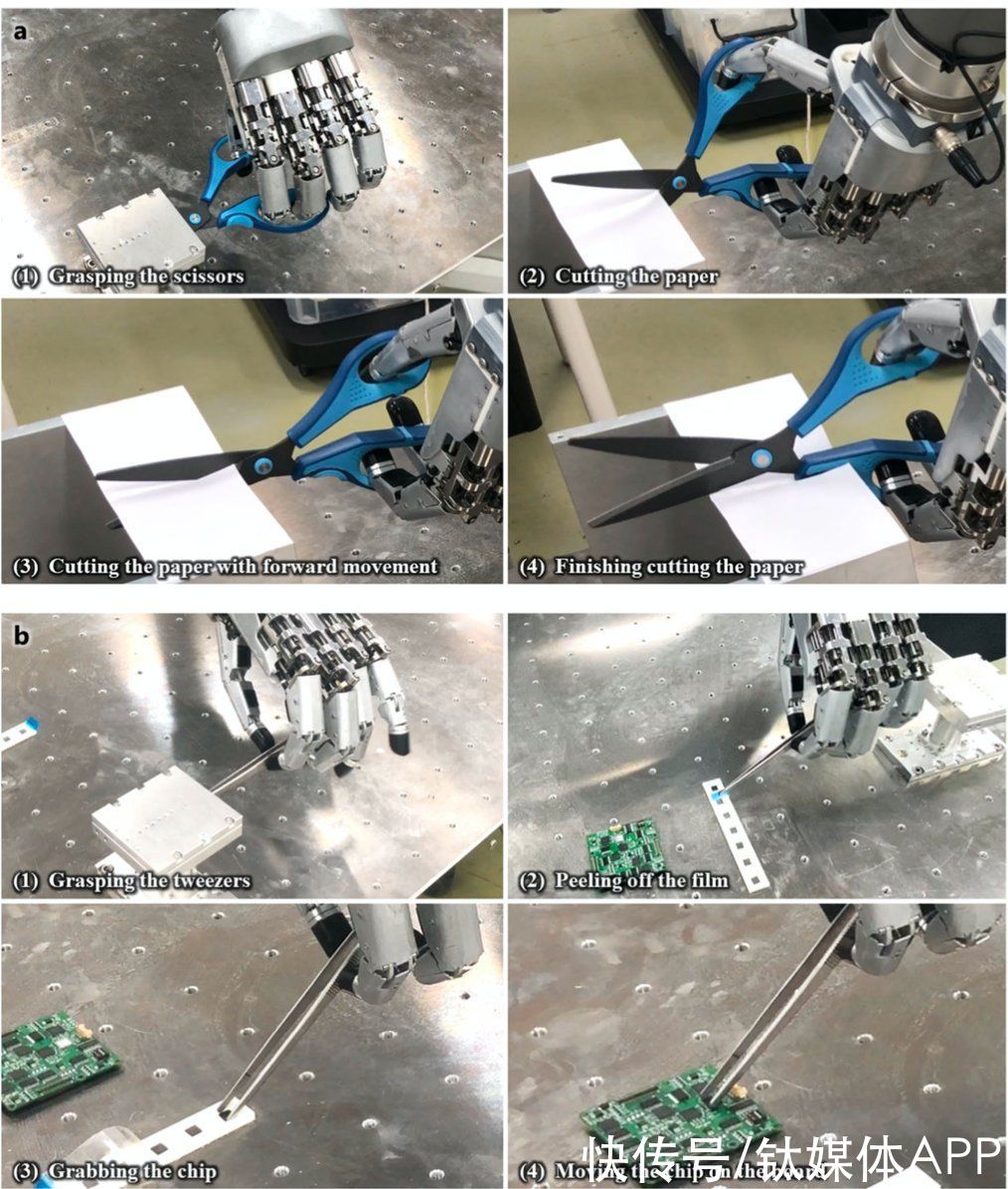
图|机器手进行各种抓握测试和精细化操作(来源:Nature Communications)
在测试环节,开发的手被用来捏扁铝易拉罐,当时在每个手指上测得的最大力为 25 N;也可以用这只手安全地抓住鸡蛋,不会捏碎;为了确认使用该机器手操纵工具的可能性,将手与商业机械手相连进行了剪纸实验,因为在日常生活中使用剪刀进行剪纸是一项需要高度灵巧的任务。
最后一项测试涉及用镊子夹住和移动小物体,操纵器移动,使镊子的尖端能够握住小芯片,手执行抓取动作,使镊子剥开芯片的盖子并抓取芯片,接下来,将物体移动到另一个位置,松开镊子以完成操作,一切都顺利完成。
文章插图
图|机器手用镊子夹起芯片(来源:Nature Communications)
- nas|ORICO上线多盘位NAS产品,多功能加持,小白也能轻松搭建
- CPU|手机并不一定越贵越好,只要明白这3点,就能轻松买到“好手机”
- Windows11|win11免费升级即将结束?想“白嫖”要抓紧,一文教你简单安装
- iPhone|想要延长你的iPhone使用年限?掌握4个小诀窍,轻轻松松撑过5年
- 摄影|“一个人”挑战一个团队,vivo S12系列轻松拍出海报级人像
- 互联网|轻住CEO赵楠谈产业数字化思考与实践:未来已来,如何抓住增长新机遇
- Google|2K价位的游戏能手!vivo T1轻松玩转主流手游,体验更出色
- 移动互联网|『微星装机』AMD平台选它就对了,轻松Hold住12核24线程的性价比配置
- 微信|微信发送原图存在位置泄露风险,教你关闭这三个开关,轻松解决!
- 华夏小康|积加RPA运营日志:5大亮点功能助卖家一臂之力,轻轻松松运营店铺