抓握|深度学习帮助机器人轻松抓握和移动物体

文章插图
加州大学伯克利分校的研究人员开发了新的机器人软件,将深度学习神经网络与运动规划优化相结合,以快速计算如何快速、顺利地捕捉和移动物体。来源: 加州大学伯克利分校照片由亚当刘
在过去的一年里,封锁和其他COVID-19安全措施使得网上购物比以往更受欢迎,但需求的飞涨使得许多零售商在确保仓库员工安全的同时难以完成订单。
加州大学伯克利分校的研究人员已经创建了新的人工智能软件,使机器人能够快速掌握和平稳移动物体,使机器人在仓库环境中很快帮助人类成为可能。这项技术在今天(11月18日,星期三)的一篇网络论文中被描述为"科学机器人"。
自动化仓库任务可能具有挑战性,因为许多人类自然而然的动作(如决定在哪里以及如何拾取不同类型的物体,然后协调将每个物体从一个位置移动到另一个位置所需的肩部、手臂和手腕运动)实际上对于机器人来说相当困难。机器人运动也容易抽搐,这会增加损坏产品和机器人的风险。
加州大学伯克利分校工程学杰出主席、该研究的高级作者Ken S. Floyd Jr.是这项研究的资深作者,他说:"仓库仍然主要由人类操作,因为机器人仍然很难可靠地掌握许多不同的物体。在汽车装配线上,同样的运动会反复重复,以便实现自动化。但在仓库中,每个订单都不同。
在早期的工作中,戈德堡和加州大学伯克利分校博士后研究员杰弗里·伊奇诺夫斯基创建了一个"抓取优化运动规划器",它可以计算机器人应如何拾取物体,以及机器人应如何移动将物体从一个位置转移到另一个位置。
然而,这个规划师产生的动议是急躁的。虽然可以调整软件的参数以生成更平滑的运动,但这些计算平均需要大约半分钟来计算。
在这项新研究中,戈德伯格和伊奇诺夫斯基与加州大学伯克利分校研究生亚哈夫·阿维加尔和本科生维沙尔·萨蒂什合作,通过集成深度学习神经网络,大大加快了运动规划器的计算时间。
神经网络允许机器人从示例中学习。后来,机器人通常可以概括为类似的物体和运动。
但是,这些近似值并不总是足够准确。戈德伯格和伊奇诺夫斯基发现,神经网络生成的近似值可以随后使用运动规划器进行优化。
"神经网络只需几毫秒来计算近似运动。它非常快,但它是不准确的,"伊奇诺夫斯基说。但是,如果我们将近似值馈入运动规划器,则运动规划器只需进行几次迭代来计算最终运动。
通过将神经网络与运动规划器相结合,研究小组将平均计算时间从29秒缩短到80毫秒,或小于十分之一秒。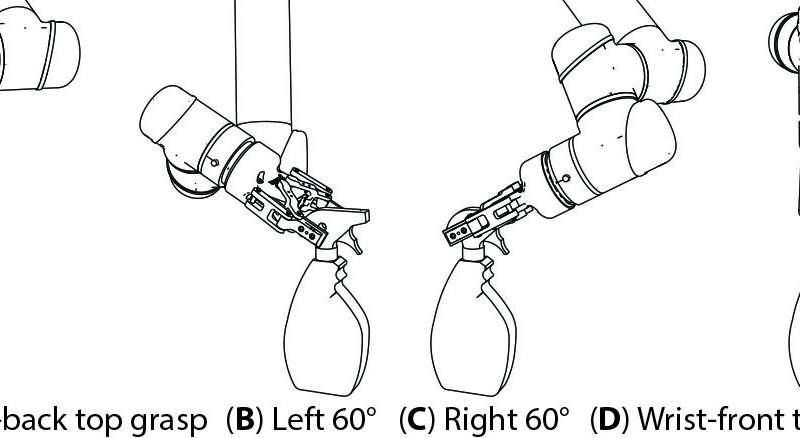
文章插图
深度学习优化运动计划程序允许机器人进行更多的运动。来源: 伊奇诺夫斯基等人, 机器人。5, eabd7710 (2020)
戈德伯格预测,随着机器人技术和其他方面的进步,机器人可能在未来几年帮助仓库环境。
【 抓握|深度学习帮助机器人轻松抓握和移动物体】戈德伯格说:"由于COVID-19,购买杂货、药品、服装和许多其他东西的购物已经发生了变化,即使在大流行结束之后,人们仍然会继续这样购物。"对于机器人来说,这是一个令人兴奋的新机会,可以支持人类工作者。
- mp4|Web前端培训:学习JavaScript重要知识点有哪些?
- find x|联发科的高端梦成了,深度解析Find X5,天玑9000真旗舰
- 淘宝|深度解析淘宝商品展示的底层逻辑,以及如何快速打上精准人群标签
- 抖音|学习“优爱腾”,抖音也要收费了
- 联想|性价比出众的联想小新平板,学习娱乐信手拈来
- Win10|仅1.2G的 win10深度精简版,比win7流畅,老旧机型首选!
- 华为|11张高清Python全知识地图,强烈建议收藏学习
- tiktok|Spotify学习TikTok,在线音乐平台为何“不务正业”
- 函数|Bengio 终于换演讲题目了!生成式主动学习如何让科学实验从寻找“一个分子”变为寻找“一类分子”?
- r助力云端训练深度学习模型,亚马逊发布Trn1新实例