聊聊手机上使用的防抖技术( 二 )
3.陀螺仪电子防抖在光学防抖逐渐在手机中普及的同时 , 电子防抖阵营也开始了升级:新方案不再通过识别画面来反求运动信息 , 而是直接从陀螺仪数据读取数据 。
相较于传统电子防抖 , 该方案的优势在于直接使用手机真实的运动信息进行防抖补偿 , 所以做到防抖效果更好的同时还减轻了算力要求 , 使得在手机或者运动相机上实现高品质的电子防抖成为可能 。 文章插图
文章插图
(左为原始素材 , 右为陀螺仪电子防抖 , 图片来自三星半导体)
相对于光学防抖来说 , 由于不需要改动镜头模组 , 相机模组的结构更简单 , 因此成本更低、空间占用更少且相对更耐用 。
另外 , 只要允许更大尺度的裁剪 , 电子防抖能提供比光学防抖多得多的补偿范围 , 即便在剧烈运动下仍能保证画面稳定 , 例如 OPPO Reno4 Pro 上的视频超级防抖 Pro 。 文章插图
文章插图
(左为原始素材 , 右为视频超级防抖 Pro , 图片来自 OPPO)
此外 , 使用陀螺仪的电子防抖同样能够分析前后帧的运动趋势 , 从而给出更好的修正结果 。 例如谷歌就利用机器学习来判断视频流内哪些运动是用户无意中的手抖 , 哪些是故意的运镜从而分别进行不同的修正——这是依靠实时修正的光学防抖做不到的 。 文章插图
文章插图
(经过电子防抖修正之后的运镜 , 来自谷歌博客)
虽然利用了陀螺仪和陀螺仪同步器 , 但是电子防抖终究是电子防抖 , 抖动造成的运动模糊还是难以消除的 。
那么有没有一种两全其美的方法呢?
4.光学 + 电子混合防抖解决方法就是这么暴力:既然光学防抖和电子防抖各有各的好 , 那么我们为啥不直接全都要呢?
简单点说就是同时采用光学和电子防抖对图像进行稳定 。 一方面 , 利用光学防抖来尽可能减少因为抖动造成的图像模糊;另一方面 , 利用电子防抖超大的补偿范围来弥补光学防抖对大范围抖动修正不足的问题 。 文章插图
文章插图
(左为原始素材 , 右为混合防抖 , 图片来自 OPPO)
当然这种方式的难点在于如何让光学防抖和电子防抖进行联动:在混合防抖的流程中 , 由于光学防抖已经用陀螺仪数据稳定过一次画面了 , 如果电子防抖再拿相同的数据稳定画面就而会弄巧成拙 。 所以在这个方案里电子防抖除了需要输入陀螺仪数据以外还需要输入光学防抖的动作数值用于防止这俩防抖的修正效果打架 。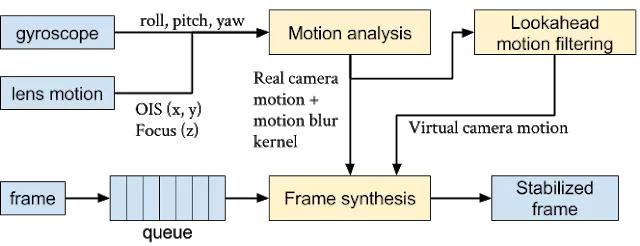 文章插图
文章插图
(混合防抖流程 , 图片来自谷歌博客)
虽说这是当前基于光学防抖模组的最佳移动端方案 , 但是这种方案还是有其局限性:例如为了电子防抖的补偿范围还是需要对成像范围进行裁切 , 再比如对超过光学防抖修正范围的运动模糊还是无能为力 。
从某种程度上说 , 混合防抖其实也只能算是无奈之举:我们都知道只要架个手机用的三轴自稳云台其实前面所说的问题都迎刃而解 , 可是又有多少人愿意多带一台和手机一样大的三轴自稳云台出门呢?
除非把这玩意儿装在手机里 。
5.微云台没错 , vivo 依靠 vivo X50 Pro (和 APEX 2020)做到了 。
和 OIS 仅移动镜组不同的是 , vivo X50 Pro所采用的微云台方案移动的是整个相机模组 。 也就是说 , 对于图像传感器来说 , 镜头的光轴在防抖的过程中并不会像光学防抖那样发生移动 , 所以不会产生因为光轴变化导致伪像 , 同时也不必担心镜组覆盖的像场不够导致边角光线损耗 。 所以微云台在结构上可以完美修正在航向和俯仰轴上的抖动而不产生伪像 , 同时还能实现比 OIS 更大的修正范围——按照 vivo 的说法是 3° 以上 。 文章插图
文章插图
(微云台防抖动作 , 图片来自 vivo)
微云台结构最大的难点就是怎么把模组塞到轻薄的手机里 。 由于无法像 OIS 一样仅驱动光学镜组 , 微云台的防抖马达需要有足够动力驱动一整个相机模组一起运动 , 但传统三轴稳定器或者云台相机所使用的无刷电机往往体积巨大 , 难以塞入手机中;而贸然缩小马达尺寸又会因为难以克服活动组件之间的摩擦等不利影响导致响应速度难以跟上手抖的速度 。
- 智能手机市场|华为再拿第一!27%的份额领跑全行业,苹果8%排在第四名!
- 对手|一加9Pro全面曝光,或是小米11最大对手
- 同比|亚马逊公布“剁手节”创纪录战绩:第三方卖家全球销售额超48亿美元 同比大增60%
- 手机基带|为了5G降低4G网速?中国移动回应来了:罪魁祸首不是运营商
- 俄罗斯手机市场|被三星、小米击败,华为手机在俄罗斯排名跌至第三!
- 手机|这个超强App,让手机快3倍,流畅到起飞
- 芯片|华米GTS2mini和红米手表哪个好 参数功能配置对比
- 当初|这是我的第一部华为手机,当初花6799元买的,现在“一文不值”?
- 国产手机|国产手机新品频发,果粉们你们还能忍得住吗?
- 卖出|国产手机出现“黑马”,起步价仅999元,首销卖出超30万台