Waymo与谷歌提出TNT模型,实现自动驾驶多轨迹行为预测( 二 )
具体来说 , 该模型的行为预测按顺序分为三步 , 每一步都有着特定目标:1、利用地图的先验信息 , 离散化并预测目的地;2、在预测目的地基础之上 , 进一步预测目标的运行轨迹;3、在预测出多条运行轨迹当中 , 对每条轨迹进行筛选和打分 , 预测出各个选择的可能性 , 也同时选择出可能性最高的几个运行轨迹 。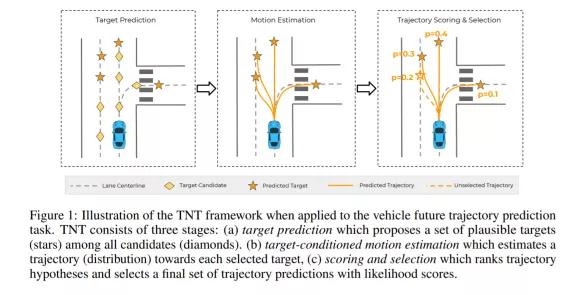 文章插图
文章插图
在技术层面 , 运用监督学习的好处在于能够让最终的模型给出多个未来轨迹的预测 , 同时明确指出各个轨迹可能性 。 比如在输出三个轨迹的情况下 , 模型能够明确指出 , 30% 可能性左转、30% 可能性右转 , 直行的可能性为 40% 。 这样的预测结果就能真正地被决策系统所使用 。
在最终的表现上 , 单个 TNT 模型的行为预测准确性在公开数据集 Argoverse 的测试表现与冠军结果相当 , 同时在 INTERACTION、Stanford Drone 等测试中取得了非常好的效果 。 文章插图
文章插图
图|论文作者团队 , 左至右分别为赵行、高继扬、孙晨
论文核心作者来自 Waymo 和谷歌 。 其中 , 赵行是 Waymo 研究科学家 , 本科毕业于浙江大学 , 在麻省理工学院获得博士学位;高继扬目前是 Waymo 的高级工程师 , 本科毕业于清华大学 , 后在美国南加州大学获博士学位;孙晨本科同样就读于清华大学 , 后博士毕业于南加州大学 , 目前在谷歌任研究科学家 。
- 创意|wacom one万与创意数位屏测评
- 黑莓(BB.US)盘前涨逾32%,将与亚马逊开发智能汽车数据平台|美股异动 | US
- 巅峰|realme巅峰之作:120Hz+陶瓷机身+5000mAh 做到了颜值与性能并存
- 抖音小店|抖音进军电商,短视频的商业模式与变现,创业者该如何抓住机遇?
- YFI正式宣布与Sushiswap合作|金色DeFi日报 | 合作
- 小店|抖音小店无货源是什么?与传统模式有什么区别?
- 星期一|亚马逊:黑五与网络星期一期间 第三方卖家销售额达到48亿美元
- 迁徙|网红迁徙记:哪里才是奶与蜜之地?
- 与用户|掌握好这4个步骤,实现了规模性的盈利
- 按键|苹果与宜家合作智能家居快捷按键,定价9.99美元