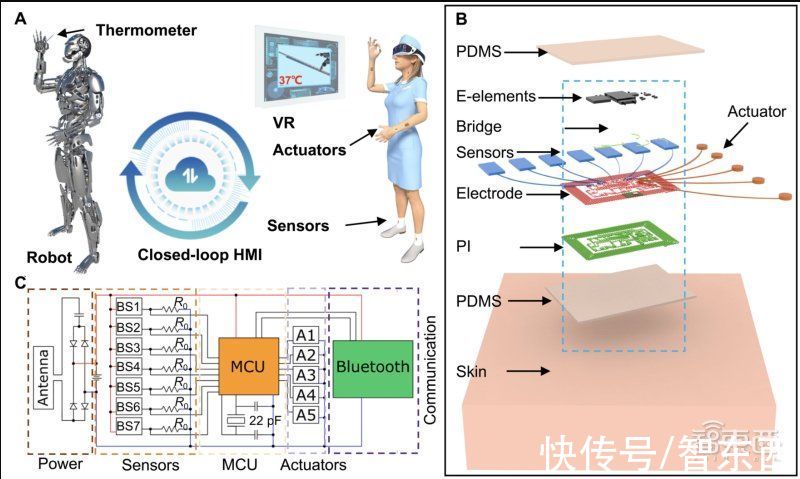
二、皮肤还可以变上衣,震动映射触觉反馈回到研究本身,新型电子皮肤的控制面板整体尺寸为57mm x 39mm x 0.8mm。
研究人员在电子皮肤中采用了多层堆叠布局,其中一层肤色弹性硅(聚二甲基硅氧烷,PDMS)可用作皮肤的软黏合剂,由聚酰亚胺(PI)互连一系列芯片和传感器,包括电阻器、电容器、蓝牙模块、微控制器单元(MCU)、电桥和研究人员自主开发的软传感器、执行器。
文章插图
CL-HMI电子皮肤的组成结构
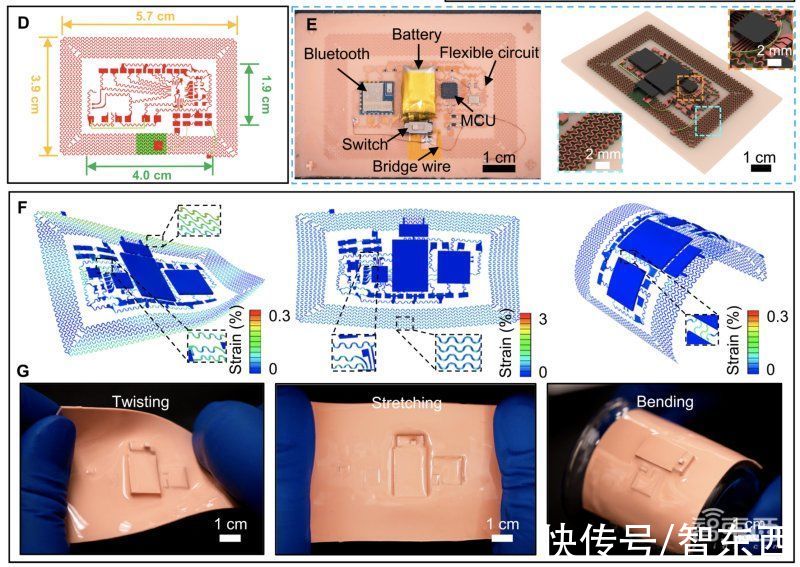
电子皮肤中的设计均根据完善的力学设计规则成丝状蛇形结构,从而使整个系统具有可拉伸性。另一层肤色弹性硅(PDMS)用来封装所有功能组件。
文章插图
电子皮肤中的蛇形结构设计
于欣格说:“电子皮肤的最终形态取决于我们想要实现的功能,它可以是一个近乎无感的小贴片,也可以是一副手套、一件上衣或者一件连体衣。”
延伸到机器人VR,论文写道,研究人员佩戴四个电子皮肤集成的贴片来控制一个13自由度的人形机器人,这个机器人能够完成人类的大部分动作。
通过配备相应传感器,机器人能同步体验来自前臂、上臂、大腿、大腿侧面、腹部的压力。
实验过程中,还能根据具体应用,自由选择弯曲传感器和触觉致动器的数量,同时佩戴VR设备,同步机器人电子眼获取的视觉信息。
如此一来,机器人VR系统就可以作为在无线操作模式下远程控制机器人的操作平台。
文章插图
手套形状的电子皮肤操纵遥控车模拟实验
关于触觉反馈的实现方式,于欣格说:“我们通过不同的震动强度以及频率来代替触觉。”震动的范围可能是从低频敲击式的震动到类似于手机震动的状态。
在研究过程中,研究人员会为使用者建立映射标准,使用者经过训练和熟悉后能够逐渐适应震动反馈,但目前为止,映射标准会因身体部位、使用者等多种因素而异。于欣格告诉智东西,他们也正在探索实现更真实映射的技术。
三、通过互联网传输,不到50毫秒就可轻松响应除了触觉感知外,机器人VR系统的无线传输功能同样神奇。
这块电子皮肤上安装了7个弯曲传感器和5个执行器。这些传感器和执行器可以直接连接到电子皮肤中MCU的模拟数字转换器(ADC)和通用型输入/输出(GPI/O)接口,用于多通道传感和驱动。
电子皮肤中包括读取信息的传感器、用于发送信息的无线发射器,以及有助于触觉反馈的小型振动磁铁。
这些传感器以锯齿形方式放置的电线组成,当贴片弯曲时,这些电线被拉得更直,弯曲、放直手臂时可以向机器人传输有关身体运动的数据。
研究人员称,这些传感器可以将人体运动转换为电信号,由MCU进一步处理并通过无线传输到目标机器人。同时,机器人上的压力传感器检测到与外部环境的接触,通过蓝牙模块控制触觉执行器的振动强度,为用户提供触觉反馈。
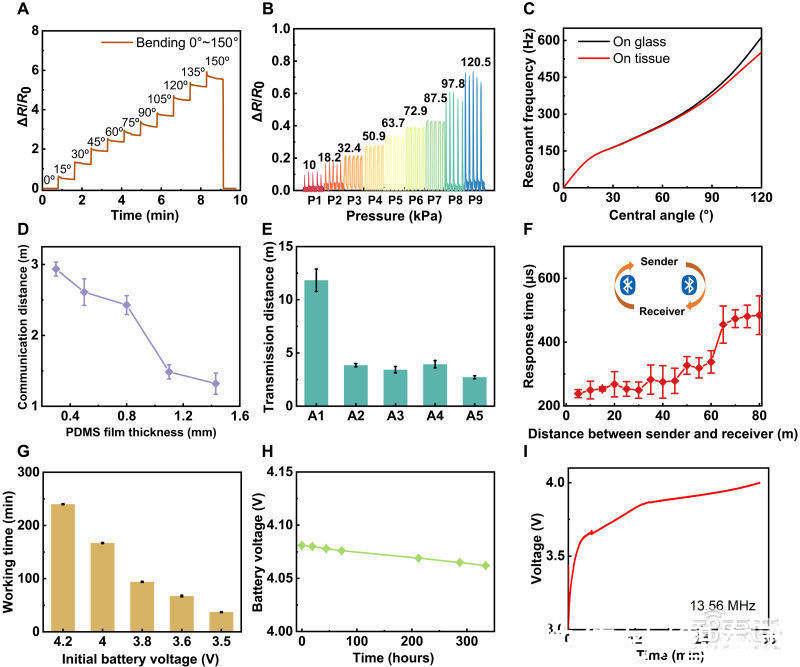
为了进一步说明电子皮肤实时无线操作的性能,研究人员测量了1-5米距离范围内的电子皮肤循环响应速度,包括信号传感、数据传输、信号接收、制动响应等环节。
研究结果表明,影响电子皮肤无线传输距离的因素有:顶部肤色弹性硅封装层厚度,人体中复杂的生物组织可能吸收电磁辐射等。
在完善机器人VR的触觉反馈方面,于欣格说:“我们现在可以通过调整电子皮肤的位置和结构解决上述问题,同时也会和更专业的通信领域专家合作,融合相关技术,继续探索机器人VR在无线通信传输领域的潜力。”
文章插图
电子皮肤的无线传输距离实验数据
除了蓝牙操作模式外,电子皮肤还支持Wi-Fi和互联网两种无线通信模式。
对于Wi-Fi模式,只要操作区域被同一个Wi-Fi网络覆盖,无线传输范围就可以扩展到数百米。在互联网操作模式下,无线传输距离可以扩展至互联网覆盖的任何地方,其响应时间范围为30.2到47.8毫秒。
四、打造线下版元宇宙,除了听、看还能摸除了医疗领域,触觉反馈也可以应用到社交、娱乐、假肢传感等方面,进一步提升用户体验。
如果将VR设备、触觉反馈和现有的在线视频软件相结合,从听觉、视觉延伸到触觉,隔着屏幕,用户就能感受到与远方亲友握手、拥抱的实感。
- 全面屏|春季打造12代酷睿主机要注意,机电散你知道该怎么选择吗?
- 苹果|国产拼命冲刺高端,苹果却在打造低端,这世道变了?
- 机械键盘|这把全钢打造的“大菜刀”,坚固耐用手感却无比柔和
- 摩尔定律|如何打造指数型产品?
- 模型|下沉市场企业,单店发展到连锁的切入点:打造门店KOL
- 抖音|抖音号新手怎么才能快速打造出高权重
- 超级马里奥|别具创意玩趣!高玩打造3D全息版《超级玛丽》
- 阿里巴巴集团|阿里影业大麦演出宣布组织升级 联手探索线下娱乐市场新增量
- |普通人如何打造知识付费体系?这篇文章给你答案
- iqoo|开年重磅旗舰:iQOO 9 Pro优秀硬件打造全面体验