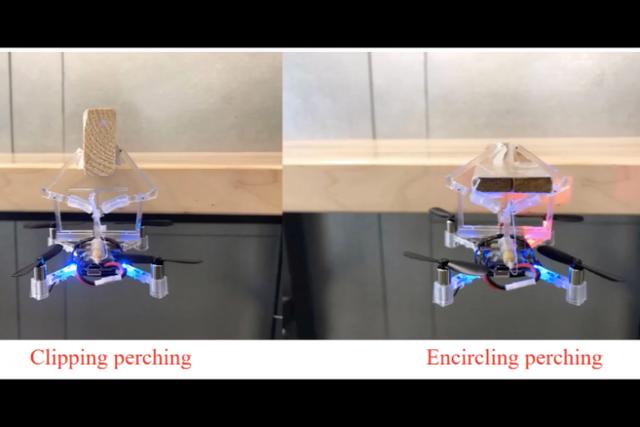
科罗拉多州立大学设计出能让无人机悬挂在物体上的机械夹具
据外媒报道 , 小型四轴飞行器或微型飞行器(MAV)的电池寿命非常短 。 所以 , 如果它们能“栖息”在某个地方而不是悬停在半空中就能获得更大的力量 。 考虑到这一点 , 一种新型的夹持机构被设计了出来 。 据悉 , 该设备由科罗拉多州立大学的一个工程师团队开发 , 安装在第三方微型机器人的顶部 。
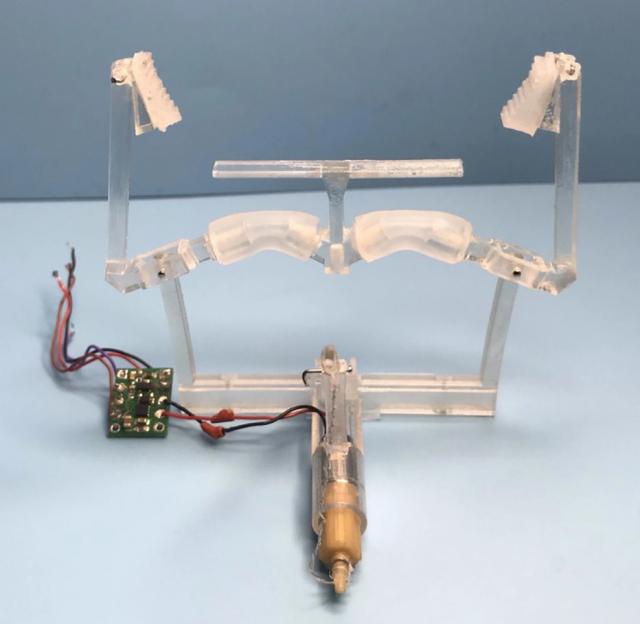
它在中间有一个垂直的柱状垫 , 其被机械地连接到两个对角举起的折叠臂--一边一个 。 在每只手臂的上端则有一个向内的爪垫 。
 文章插图
文章插图
【科罗拉多州立大学设计出能让无人机悬挂在物体上的机械夹具】当MAV飞向水平物体的底面如树枝、管道或栏杆时 , 冲击力会将垫子向下推 。 这样就会使两只手臂向内折叠从而紧紧地抱住物体并将无人机固定在合适的位置 。 然后 , 它的螺旋桨发动机在此时就可以关闭直到需要再次飞行再重新开启 。
 文章插图
文章插图
根据物体的直径 , 机械臂可以用它们的爪垫从两边抓住物体 , 也可以环绕物体并在上面会合 。 在这两种情况下 , 抓取动作完全是机械的而不需要电力 。 当降落并恢复飞行时则需要少量的力量将机械手臂分开 。
开发团队成员Jianguo Zhao博士说道:“虽然我们的双稳爪用于手掌大小的四轴飞行器 , 但这种设计策略也可以被应用到大尺寸的微型飞行器从而用于高效的停留和空中抓取 。 ”
据悉 , 这个夹具在下面的视频中进行了演示 , 并在最近发表在《IEEE Explore》上的一篇论文中进行了阐述 。
- 日本工程师:潘多拉魔盒被美国打开,中国办芯片大学只为打破禁令
- 卡内基梅隆大学提出了更好的强密码设置建议
- 建设|校地合作 绵阳涪城区携手浙江大学发布5g创新成果
- 又是别人家的孩子?宿舍串门请先刷指纹 西电大学生自制趣味智能锁成“网红”
- 普通大学计算机专业的本科生,该选择主攻前端还是Java
- 浙江携手英国西苏格兰大学共建创新基地
- 导航|攻坚“卫星导航信号弱”难题,高德程序员联手武大学子夺得国际室内定位大赛冠军
- 清华大学研究院出手!擦一次,持续24小时防雾,改变眼镜党体验
- 北大最大单体建设项目封顶
- 首家"芯片大学"即将落成,盖茨:中国芯将崛起,美国将大量失业