工业机械手臂外部模式使用流程及注意事项
使用外部模式时都需要先配置工业机械手臂相关的 IO 信息 , 然后在 EXT_PRG 变量中添加
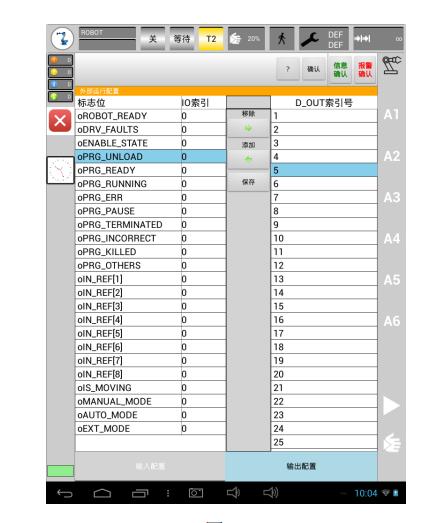
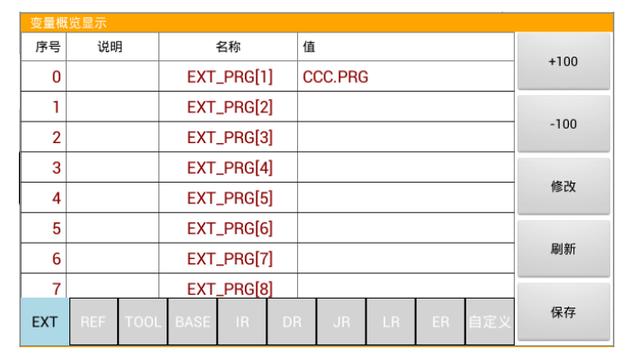
【工业机械手臂外部模式使用流程及注意事项】需要加载运行的程序 , 否则无法实现通过 IO 信号控制工业机器人加载程序运行 。 使用流程如下:(1)、配置相关的外部运行信号 。 在配置->工业机器人配置->外部运行配置中配置相关信号点 , 如下图 , 分别选中对应的标志位和 IO 索引号 , 点击“添加”按钮即可 , 工业机械手配置完成后点击“保存”按钮 , 保存相关的配置信息 。 (2)、在显示->变量列表中找到 EXT_PRG 变量列表 , 然后选中 EXT_PRG[1] , 点击“修改” , 填入需要加载的程序的名称 。 点击确定 , 保存 。
 文章插图
文章插图
 文章插图
文章插图
注意事项:
1、外部模式下 , 只能加载运行一个工业机械手臂程序 , 即加载运行 EXT_PRG[1]中的程序 。
2、外部模式下 , 如果需要修改工业机械臂程序内容 , 在修改完成程序后 , 需先在手动/自动模式下 , 加载运行一次修改后的程序 。 如果不加载一次修改后的程序 , 会出现外部运行加载的程序仍然是修改前的程序的状况 , 这是由于华数工业机器人示教器和控制器之间的文件传输机制决定的 , 由于目前两者暂不能实现自动同步 , 因此需人为地加载下发示教器的程序到控制器 。
3、使用外部模式时 , 为保证工业机械手系统的正常运行 , 建议工业机器人与总控的信号处
理都使用交互信号的机制 , 即总控发给工业机器人一个信号后 , 需收到工业机器人反馈的
信号再进行下一步的操作 。 4、在工程的调试阶段或者遇到信号交互故障时 , 建议使用虚拟信号功能进行调试和故障排查 。
11 主程序和子程序
每一个示教程序都可以分为 3 个部分:常量及变量声明部分、主程序、子程序 。 其中 , 工业机械手臂主程序是必需且唯一的 , 当用户开始运行示教程序时 , 系统会自动进入主程序开始执行 。 当用户在工业机械手臂示教器中新建一个“程序”时 , 示教器软件会自动为它生成一个主程序模版 。 子程序是可选择性调用的 , 由用户编写 , 一个主程序中可以调用多个子程序 。
11.1 工业机械手臂主程序
通常用 Program…End Program 关键字来指明工业机械臂主程序的范围 , 这也是自动生成的主程序所使用的关键字 。 当程序加载后 , 需要按下启动键 , 程序才会开始执行 。 如果希望程序被加载后就自动开始执行 , 那么使用 Program Continue 替代 Program 作为主程序头 。
当程序执行到 end Program 时 , 工业机械臂程序会停止执行 , 但它仍然在内存中 。 如果
希望它执行完毕后自动卸载 , 即将工业机械手臂程序从内存中卸载 , 须使用 Terminate 替代 End Program 作为主程序尾 。 所有全局变量(使用 Common Shared 声明 , 整个系统都可以对其进行读写) , 都必须在主程序头之前进行声明 。 所有程序变量(使用 Dim Shared 声明 , 整个工业机械臂示教程序都可以对其进行读写) , 都必须在主程序头之前进行声明 。 局部变量(使用 Dim 声明 , 只能在声明该变量的程序体中可以对其进行读写) , 必须紧跟在程序头后进行声明 , 即在 program/sub 后进行声明 。 主程序内编写的工业机械手臂子程序都必须在程序尾后进行声明 , 不能穿插在主程序中 。
- 我国首次给四个新职业定标
- 美的探索工业互联网+5G+AI应用场景,成本可降低10%
- 打造青岛世界工业互联网之都 首届电商直播专项职业能力考评顺利举办
- 3D大屏监控选矿工艺
- 工业|西南地区首张5G工业专网正式商用
- 涉足水利行业,蒲公英4G工业路由器助力IOT智能互联
- 录音笔|科技解放生产力 录音笔的智能化进程
- 上海化学工业区举办第二届智慧园区技术论坛
- 威刚发布工业级ICFP301 CFexpress B型存储卡 最高容量512GB
- 大连长征云等6个平台入选省级重点培育工业互联网平台第一批名单