从摸黑乱撞到来去自如!扫地机器人如何拥有一双“慧眼”
说起扫地机器人 , 大家都不会感到陌生 , 如今 , 他它已经成为了许多家庭中的清洁好助手 , 自动寻路、自主规划、扫拖一体 , 全都一网打尽 。
而扫地机器人之所以能够做到如此地步 , 很大程度上都仰赖于环境感知传感器方面的巨大发展 , 让机器人有了一双“慧眼” 。 只有看清周围的环境 , 才能规划自己接下来的行动和路线 。
那么 , 今天我们就来看一看扫地机器人的“慧眼”究竟如何养成 。 它又有着怎样的发展史 。
虽然扫地机器人看起来是个新事物 , 但其实早在1985年 , 世界上第一台扫地机器人就已经登场 。 日立公司的室内清洁机器人HCR-00于这一年展出 , 依靠陀螺仪和超声波雷达实现定位 。 它的出现奠定了接下来近20年扫地机器人发展的基础 , 依靠超声波定位成为了共同的解决方案 , 庞大的体积也是它们共同的特点 。
直到2002年 , 第一款真正意义上的家用机器人才开始出现 。 从这一年开始 , 扫地机器人的体积开始越来越小 , 全新的随机碰撞算法也加入其中 , 让机器人的清扫拥有更大的清扫覆盖范围 。
扫地机器人进入陀螺仪+超声波+随机碰撞来感知环境的初级阶段 。
但是此时扫地机器人的缺点依旧明显 , 运动随机性太强 , 同一块区域被反复清洁 , 而同时有的区域可能并不能够被覆盖 , 造成实际清扫范围对于全屋的覆盖并没有想象中提升的那么明显 。 甚至需要额外的“灯塔”插件来辅助定位 , 房间摆的越多 , 清扫覆盖率就会更加完美 。
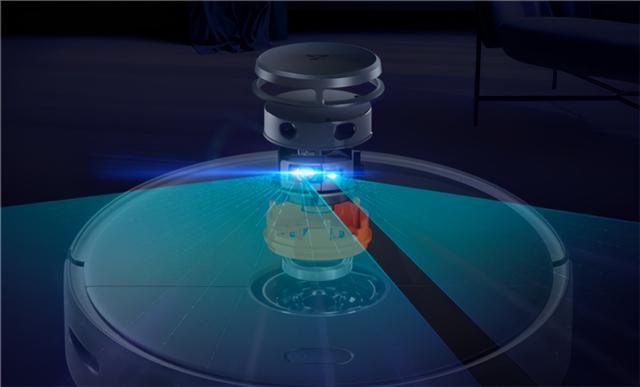
革命式的进步发生在2010年 , 360°的激光雷达扫描扫瞄即时定位与环境地图构建(SLAM)让扫地机器人终于能够洞察周围的环境 。 基于LDS激光雷达的传感器数据 , SLAM算法能够有效解决智能扫地机器人在家庭环境中的定位、导航等需求 。, 实现从上到下无死角的扫描和感知 。
 文章插图
文章插图
这套系统比传统方案更加的迷你 , 扫描效率和精度也大大提升 , 扫地机器人能够以SLAM绘制的地图为基础 , 对清洁路线进行合理的规划 , 甚至能够实现断点需扫等功能 , 保证清扫最高效 , 对地图的覆盖最为完美 。 由此开始 , 扫地机器人终于开始了在吸尘器市场的增长 , 从原来不多见的稀缺物件 , 到2016年已经增长到了北美市场的20% , 可以说正式走入了大众的视野 。
 文章插图
文章插图
有了SLAM算法之后 , 厂商们所需要做的就是一些修修补补 。 提高算法的精度和完善度 , 确保面对各种情况都可以得出最为高效的最优解 。 在功能趋近完善之后 , 扫地机器人唯一剩下的问题也就是价格 , 需要一款平民级的产品出现 , 让扫地机器人从动辄4000起步的高档用品 , 变为真正的千元级平民清洁神器 , 达到真正的普及 。
而这 , 就不得不提小米和石头科技做出的贡献 。 在2016年8月 , 石头科技推出了米家扫地机器人 , 功能上采用了与市面上相同的激光雷达导航技术 , 但是价格却实现了同类产品腰斩 。 仅1699元 , 让这款产品成为了爆款 , 单品销量甚至超过了10亿人民币 。
 文章插图
文章插图
有了米家扫地机器人这一个好的开始 , 石头科技接下来也推出了不少新品 , 在技术上又有的新的创新 。 以最新的旗舰产品石头扫地机器人T7 Pro , 就在原本完善的LDS激光雷达的基础LDS传感器基础上 , 加入的双目避障这一全新的功能 , 实现了对于地面小物体的感知 。 地面上的玩具、线材 , 插座等物体 , 都不再会成为扫地机器人清扫的阻碍 。
在双目避障方案的帮助下 , 石头扫地机器人T7 Pro能够同通过摄像头捕捉物体的图像 , 连接云端AI完成图像识别 , 从而实现对于物体的类型判断 , 采取各种不同的避障方案 , 兼顾清扫的覆盖度和避障成功率 。