激光雷达、相机…万字长文带你入门无人驾驶车硬件( 五 )
在天气良好的情况下 , 相机最远可以看到 1000m 左右的距离 , 比激光雷达能够更早的发现远处的交通状况 。
相机是被动型感光设备 , 对光照的变化十分敏感 , 在有强光直射和阴影变化的时候拍摄质量会严重下降 , 在夜晚的时候相机的表现也不太好 。 另外相机在拍摄快速移动的物体的时候会出现运动模糊 , 拍摄的照片有重影或者模糊不清 。 通常在下雨天气 , 无人驾驶车会使用车内的相机做环境感知 , 暴露在车外的相机镜头会被雨水模糊 。 最新有报道利用激光做雨刷的新闻 , 对以后相机暴露在雨天工作可能有帮助 。 为了获取足够的视野无人驾驶车一般会配备多个相机 。 这就引入了一个问题 , 多个相机的拍摄时间可能不一致 。 那么如何保证多个相机的拍摄时间一致呢?相机有一个触发器(Trigger) , 用于触发相机拍照 , 通过控制信号同时触发多个相机的触发器来拍照 , 就可以保证所有照片都是同一时间拍摄的了 。
3. 分类
按照使用到的相机个数 , 分为单目相机和双目相机 。
单目相机 。 单目相机由 1 个相机组成 , 结构简单 , 成本低 , 但是无法测量准确的距离 。
双目相机 。 双目相机由 2 个相机组成 , 由于 2 个相机之间的距离已知 , 可以估算出空间距离 , 但是标定和计算量比单目相机大 。
按照相机的焦距 , 分为长焦相机和短焦相机 。
长焦相机 。 长焦相机看的距离远 , 在拍摄远处的景象的时候更加清晰 。 在无人驾驶车中 , 长焦相机用来发现远处的交通状况和红绿灯识别 。
短焦相机 。 短焦相机主要用来发现近处的物体 , 视野范围比长焦宽 。 障碍物识别、车道线检测和场景分割等多个任务都需要用到短焦相机 , 往往车上会集成多个短焦相机 , 覆盖整个车的视野范围 。
按照类型划分 , 除了最常见的相机之外 , 还有事件相机、全景相机、深度相机和红外相机 4 种新型相机 。
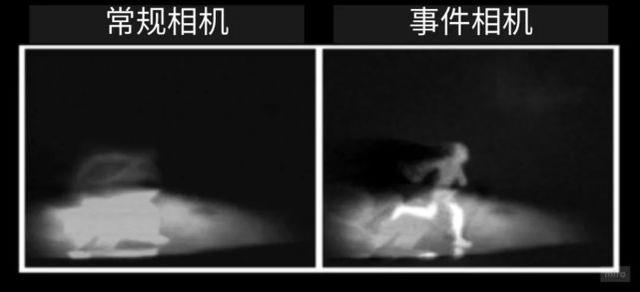
(1)事件相机(Event Camera) 。 事件相机中的每个像素独立响应亮度的变化 , 通过捕捉亮度变化成像 , 因此对运动物体捕捉效果非常好 , 并且不受曝光时间限制 , 成像速度非常快 。 普通相机在高速运动状态下会出现运动模糊 , 而事件相机则很好的解决了这个问题 。 目前事件相机的主要限制是像素大小和图像分辨率 , 例如 DAVIS240 型号的事件相机像素大小只有 18.5x18.5μm , 分辨率为 240x180 。 如图 2.8 所示 , 分别是普通相机和事件相机拍摄到晚上有行人在汽车前奔跑的画面 , 可以看到普通相机出现了明显的曝光不足和运动模糊 , 而事件相机则很清晰 。
 文章插图
文章插图
图 2.8 普通相机和事件相机效果对比
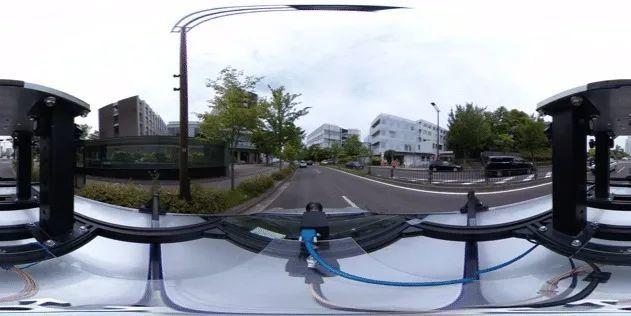
(2)全景相机(Omnidirectional Camera)全景相机有 360° 的采集视野 , 解决了单个相机视野范围不足的问题 。 全景相机通过 2 枚或者 4 枚鱼眼镜头进行拍摄 , 然后把拍摄好的照片拼接起来 , 组成全景照片 。 全景照片技术已经非常成熟 , 已经应用在 VR 看房等场景 , 对导航 , 定位和地图制图都很有帮助 。 如图 2.9 所示全景照片的边缘畸变非常严重 , 需要算法处理之后才能正常显示 。
 文章插图
文章插图
图 2.9 全景照片示例
(3)深度相机(Range Camera) 。 深度相机能够获取环境的深度和颜色信息 , 目前有 3 种深度测距方法:结构光测距、飞行时间法和双目视觉测距 。 深度相机能够探测的距离非常有限 , 因此主要还是应用在室内场景的三维重建 , 如图 2.10 所示 。
图 2.10 深度相机效果图
(4)红外相机(Infrared Camera) 。 红外相机通过热成像原理对行人进行检测 , 目前在无人驾驶中还没有大规模应用 。
- OPPO Reno4 Pro 5G的DXO相机评分出炉!拿到108分
- 曝iPhone 13全系标配激光雷达扫描仪 真就十三香?
- Galaxy S21系列相机规格曝光:Ultra配1.08亿像素主摄
- 谷歌相机最新版移植来了!新增电影运镜
- 设计总监谈小米11外形:后摄方案百里挑一、多花2000万定制相机模组
- 小米10i手机参数曝光!专供印度市场后置相机大升级
- 一加Nord智能机DxOMark相机得分108:表现中等 性价比尚可
- 佳能新专利曝光 或将推出云台相机
- 智能手机的冲击下,日本相机巨头没落,70余年的日本造迎来终结
- 尼康相机将于2021年底前彻底告别“日本产”